Connector Optionsパネル
Connector Optionsパネルを使用して、コネクターの一般的なオプションのほか、スポット、ボルト、シーム、面コネクターなどに固有の各種オプションを設定します。
- Connectorsモジュール
- Spot、Bolt、Seam、およびAreaの各パネルでoptionsをクリックすることで利用できます。
General Optionsサブパネル
| オプション | 動作 |
|---|---|
| fail hexa seam or area connector, if | この基準値は、個々のコネクターに保存されます。従って、Connectorブラウザからリアライゼーションが」実行された場合、コネクターは個別に考慮されます。
|
| consider shell thickness and offset for solid positioning | コネクターを配置する際にシェルの板厚とオフセットを考慮します。このチェックボックスがオフになっている場合、コネクターは理想的なシェル位置でリアライズされます。1 ACM(スポット)やhexa adhesives(シームと面)など、リアライゼーションボディにヘキサ要素を使用するリアライゼーションタイプは、このオプションによって変化します。 |
| shared entity global options | コネクターのリアライゼーション中に結合する要素が作成されます。完全な結合を作成するため、エンティティやコレクターを追加で作成する必要が生じる場合があります。これらのエンティティおよびコレクターは、通常いくつかのコネクターで共有されているため、共有エンティティと呼ばれます。共有エンティティのグローバルオプションでは、共有エンティティを編成する方法および不要になった共有エンティティを削除する方法を指定します。
|
| angle classification for penta (Mig) and hexa (adhesive) | penta (mig)シームコネクターまたはhexa (adhesive)シームコネクターがB、L、Tの各接続になる場合に指定します。 図 1. angle classification for penta (Mig) and hexa (adhesive)の例. ここでは、hexa (adhesive)の角度分類を定義しています。hexa (adhesive)の角度が0°から10°までの場合はB接続、10°を超えて30°までの場合はL接続、30°を超えて90°までの場合はT接続がそれぞれ作成されます。 |
Spot Optionsサブパネル
| オプション | 動作 |
|---|---|
| end offset= / half spacing |
|
| non-normal projection | 法線の投影を不要として、リンク候補の検索範囲をコネクターのトレランスの範囲に限定します。 通常、リンク検出はリンク候補に対する有効な法線(5°以下の傾斜は法線として認識される )の投影が必要になります。直交投影ができない場合、リアライゼーションはエラーとなります。 スポットに対しては、このオプションがデフォルトで無効になっています。 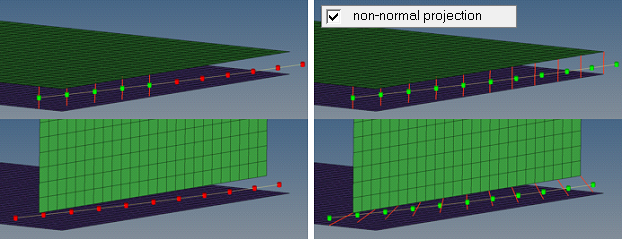 図 2. |
| system definition | 簡潔な1D有限要素表現の作成に伴う座標系の作成を可能にします。1次元要素は配置された座標系のy軸と平行です。
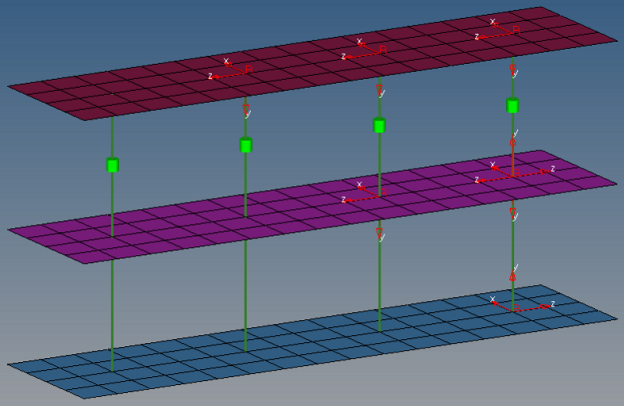 図 3. |
| links conservation | スポットコネクターまたはシームコネクターに追加リンクを保存するかどうかを定義します。
|
| use normal direction of the closest element to determine links | 最も近い要素の法線方向に基づいてスポットコネクターにリンクを追加します。 小さいコンポーネントが多数存在するために、誤ったコンポーネントがリンクと判断される可能性がある状況で、このオプションが効果的です。
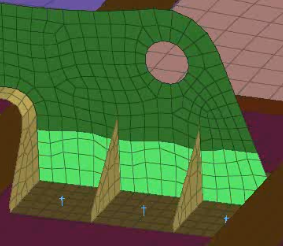 図 4. |
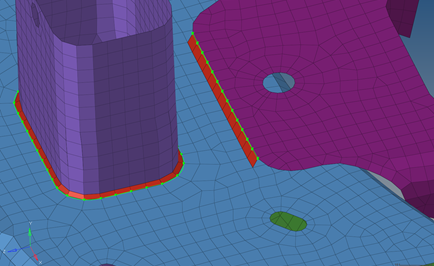
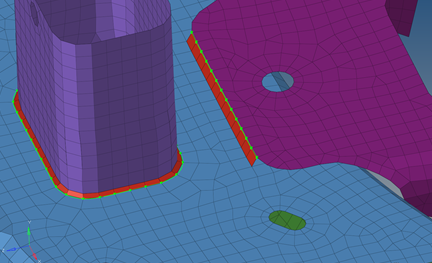
| orthogonal faces 1 hexa acm | 可能な限り直交する状態でACMヘキサ要素を作成します。 このオプションは、normal shell gapオプションを無効にします。
 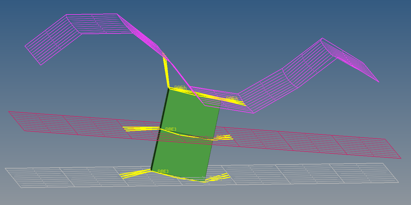 図 5. 図 5. project hexa faces to shellも有効になっている場合、シェルギャップは強制的に最小で作成され、1つのリンクから次に向かう各ヘキサのエッジは互いに平行になります。
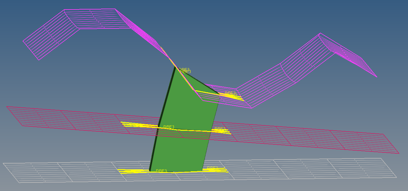 図 6. |
| project hexa faces to shell | 個々の節点に関して投影を確認し、貫通が発生することを許可することが可能になります。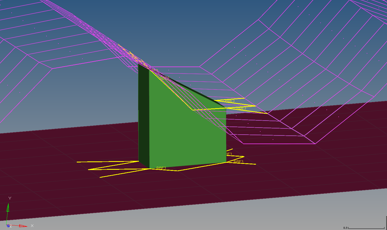 図 7. 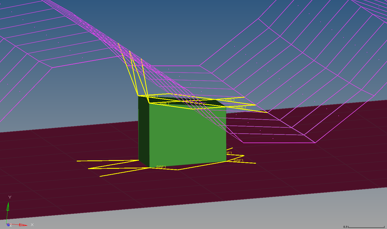 図 8. |
| ensure valid projection for shell gap | リンクへのヘキサ節点の投影のうち、指定された許容値(0.01*直径)を超えるものがすべてエラーとしてマークされます。 ヒント: 接触定義を使用する結合を扱う場合は、このチェックボックスをオンにします。
|
Bolt Optionsサブパネル
| オプション | 動作 |
|---|---|
| end offset= | ラインを使用して一連のボルトを作成する場合、これはコネクタが端からどこまで作成されるかを決定します。1.0mmの値を設定すると、ラインから1.0mmの位置からテストポイントが開始されます。 |
| no systems | 選択に応じた座標系を作成します。 No System: 座標系は作成されません。 Single System: ボルト全体の座標系を作成します。 1 system per layer: レイヤーごとに1つの座標系を作成します。 |
| consider bolt collinearity | ボールドが2層以上ある場合は、ボルトボディが直線上にあるよう試みます。 |
| auto create missing attachments | 欠落したボルト部分を自動的に作成します。 |
| minimum needed links | リンク検出時、指定された層数に基づいた有効な投影を実行するうえで必要なリンクにのみリンク候補が限定されます。 例えば、3層のスポットコネクターの場合、指定したトレランスの範囲で4つ以上のリンクエンティティを事前に選択していても、実際に設定されるリンクは3つであることが普通です。シームコネクターの場合、この検討は各テストポイントにおいて行われるため、リンクの数は一般的に層数より多くなります。 |
| re-apply during realizations | リアライゼーションの際、不要な定義済みリンクを削除します。コネクターに既に存在するリンクのみが考慮されます。 |
| extra links= | 必要な数より多くのリンク候補をコネクターに保存します。 リンクは、各層の数に加え、各テストポイントにおいても保存されます。これは、extra linksが5の場合、3層のスポットコネクターはリンク候補を8つまで保存します。また、6つのテストポイントを持つシーム(2層)の場合はリンク候補を42個まで保存することになります。 |
Seam Optionsサブパネル
| オプション | 動作 |
|---|---|
| discontinuity weld length tol | 要求した非連続な溶接長さからの逸脱の上限と下限を%で指定します。
|
| links conservation | スポットコネクターまたはシームコネクター上に追加のリンクを保存するかどうかを選択します。
|
| re-apply during realizations | リアライゼーションの際、不要な定義済みリンクを削除します。コネクター内にすでに存在するリンクのみが考慮されます。 注: link conservationをminimum needed linksに設定している場合にのみ使用できます。
|
| link option | コネクターにどのようにリンクするかを選択します。 seamコネクターは、各テストポイントの2つのリンクを接続します。
|
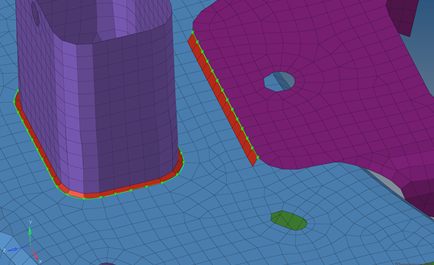
| sliver elements at free edges | element length欄で指定した値より長さが短く、モデルの中でフリーエッジに位置するスライバー要素をどのように管理するかを選択します。 スライバー要素は、モデルには望ましくない小さな要素です。 下の図では、完全に垂直な投影の結果として、スライバー要素が生じています。赤い要素がHAZ要素を表しています。
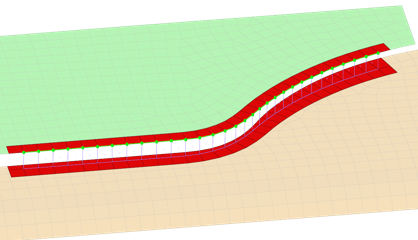 図 11. allow 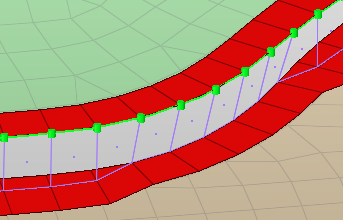 図 12. prevent by moving projection points 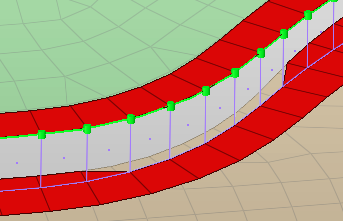 図 13. prevent by moving edge 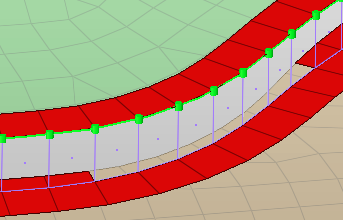 図 14. delete sliver elements |
| element length < | モデルに存在するスライバー要素のうち、その長さがここで指定した値未満であるものをsliver elements at free edgesオプションで管理します。 |
| washer preservation | シームに近い位置に存在するワッシャー要素をどのように修正するかを選択します。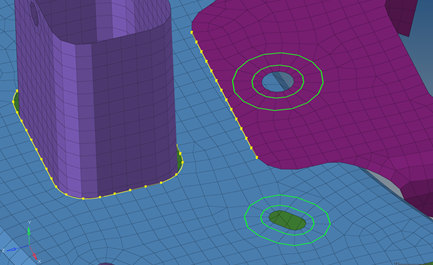 図 15. ワッシャー要素の例. ワッシャー要素は緑色で示されています。
|
| don't share zone elements | ゾーン要素が共有されないようにします。 インプリントされる要素が目標のサイズになるようにシーム溶接を生成するため、シーム溶接が互いに近接していても、インプリントされる要素を2つのコネクター間で共有できます。
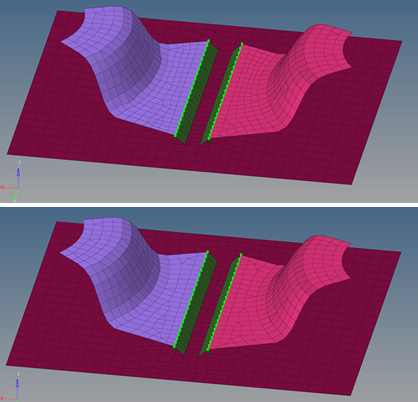 図 19. |
| max quadsize reduction in % | インプリントする四角形要素の、要求サイズからの最大許容偏差を指定します。 デフォルトでは、この値は30.0%に設定されます。5.0~80.0%の間で設定可能です。
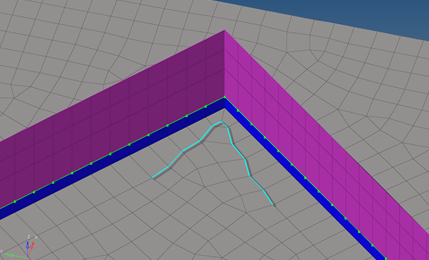 図 20. |
| max quadskew in degrees | 理想的な直角の四角形要素からの最大許容偏差を指定します。 デフォルトでは、この値は30.0度に設定されます。5.0~45.0度の間で設定可能です。
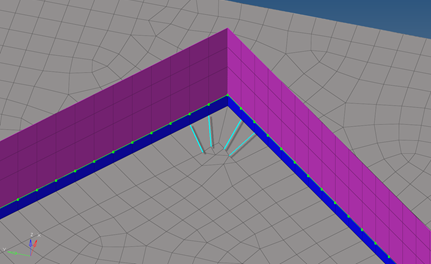 図 21. |
| feature angle | メッシュの節点がサーフェスに関連付けられていない場合、保護する必要のある可能性のあるフィーチャーを特定するには、フィーチャー角度が必要となります。デフォルトでは、この値は30.0度に設定されます。最小値は10.0度です。フィーチャーは、領域をインプリントするために閉じられている場合は、保護されません。 |
| corner quads | シームが滑らかでなく、コーナーが存在する場合、その周辺のメッシュパターンを指定します。
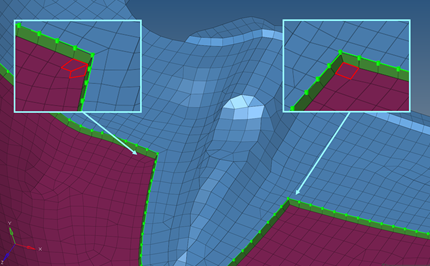 図 22. |
Area Optionsサブパネル
| オプション | 動作 |
|---|---|
| non-normal projection | 法線の投影を不要として、リンク候補の検索範囲をコネクターのトレランスの範囲に限定します。 Areaの場合、このオプションはデフォルトではオフになっています。通常、リンク検出はリンク候補に対する有効な法線の投影が必要になります。
注: 5°以下の角度は法線として認識される点に留意してください。直交投影ができない場合、リアライゼーションはエラーとなります。
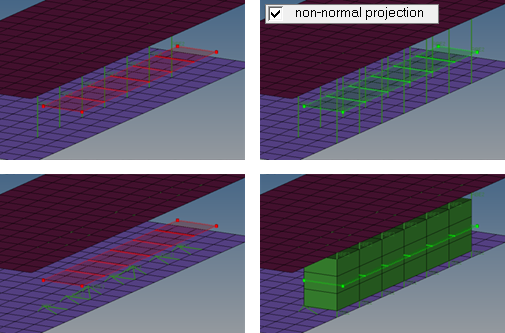 図 23. |
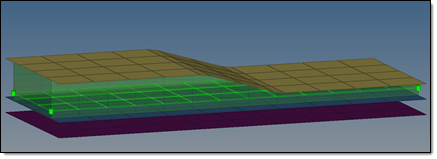
| link option | コネクターにどのようにリンクするかを選択します。 面コネクターは、各テストポイントの2つのリンクを接続します。
|
Apply Mass Optionsサブパネル
| オプション | 動作 |
|---|---|
| check for missing link | アンリアライズしたコネクターを再びリアライズする前に、コネクターにある各リンクをチェックします。リンクが存在しない場合、そのコネクターは作成されません。 アンリアライズしたコネクターのリンクが1つ以上コネクターに存在すれば、アンリアライズしたすべてのコネクターを再度リアライズする場合、このチェックボックスをオフにします。 |
Fe Configサブパネル
Fe Configサブパネルを使用して、カスタムのfeconfig.cfgファイルを読み込み、それまでに読み込んだfeconfig.cfgファイルを破棄します。
現在のHyperWorksデータベースのコンフィグリストに存在するIDや名称を持つコンフィグタイプを記述したfeconfig.cfgファイルを読み込むと、重複するコンフィグタイプは読み飛ばされます。既存のコンフィグタイプを新しいコンフィグタイプで上書きする場合は、overwrite if a config ID or name existsチェックボックスをオンにします。
-
- T Connections
-
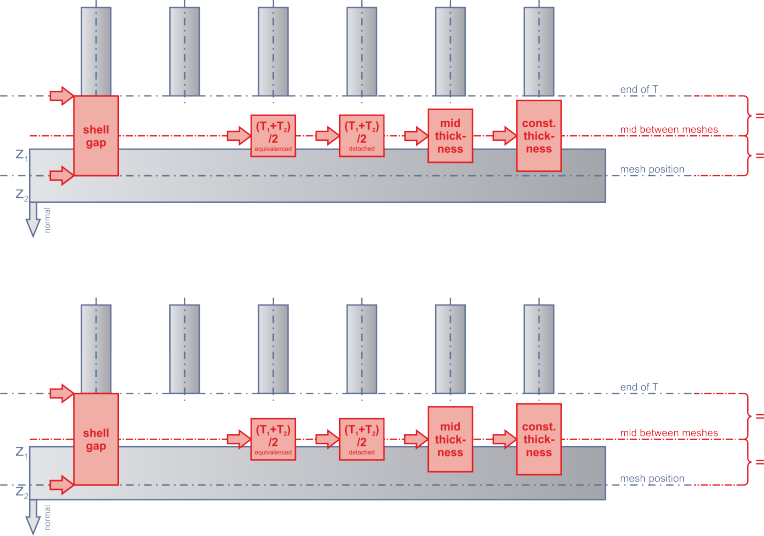
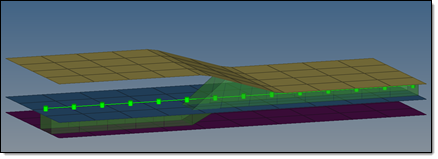
図 26. consider shell thickness and offset for solid positioningを無効にした状態. メッシュ間の中間面の周囲にヘキサが配置されます。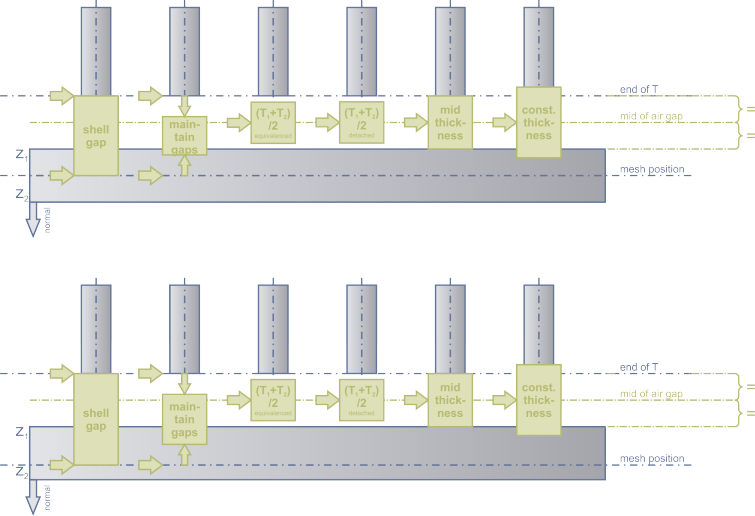
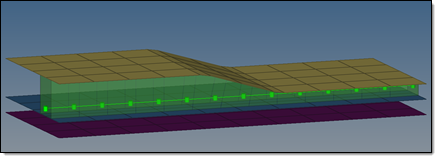
図 27. consider shell thickness and offset for solid positioningを有効にした状態. 中間の空隙の周囲にヘキサが正確に配置されます。 - Lap Connections
-
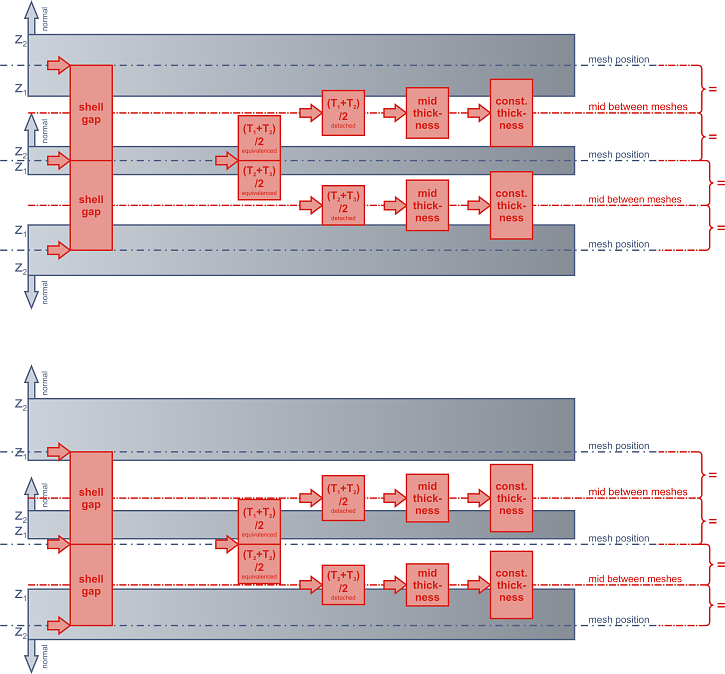
図 28. consider shell thickness and offset for solid positioningを無効にした状態. メッシュ間の中間面の周囲にヘキサが配置されます。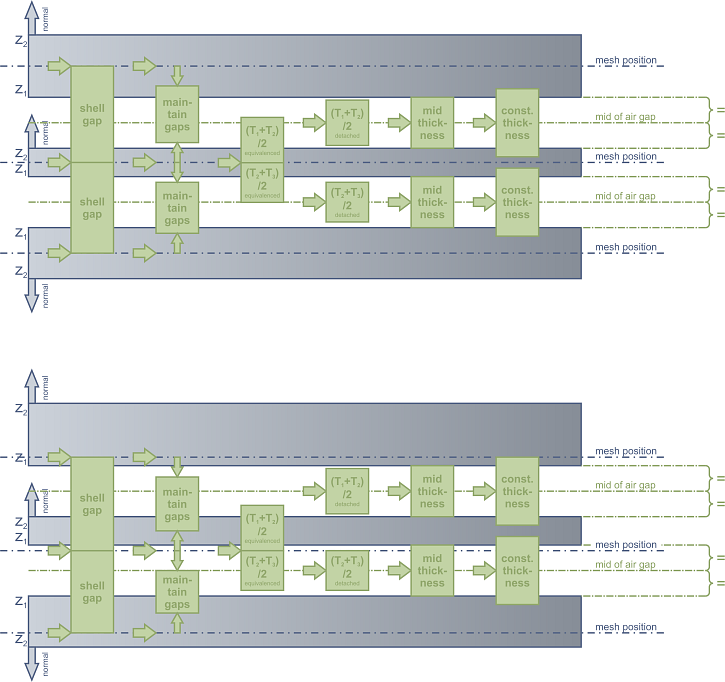
図 29. consider shell thickness and offset for solid positioningを有効にした状態. 中間の空隙の周囲にヘキサが正確に配置されます。