RD-E: 2202 Ditching using ALE (Mono-Domain)
Impact of a simple object on water simulated by ALE approach.
The problem consists of a simple object falling into water simulating the ditching of a helicopter.
Options and Keywords Used
Input Files
The input files used in this example include:
<install_directory>/hwsolvers/demos/radioss/example/22_Ditching/Ditching_Mono_Domain_ALE/*
Model Description
Units: mm, ms, KN, GPa, kg
Impact of a triangular object on water is performed and the results are compared qualitatively 2, also using the experimental data obtained from the Politechnico di Milano. 1
The computation is performed using several impact velocities of 3.5 and 11 m/s.
- Material Properties
- Initial density
- 7.8 x 10-6 kg.mm-3
- Young's modulus
- 206.9 GPa
- Poisson ratio
- 0.3
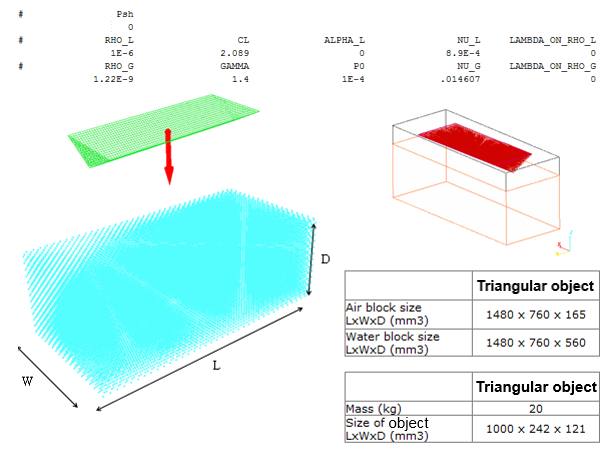
Figure 1. Problem Data
Model Method
The object is modeled using shell elements with an average mesh size of 15 x 15 mm2. In order to simplify the computation, it is put in a rigid body with an accelerometer on the main node.
The water is modeled using 15x15x15 mm mesh with a total of 166023 elements.
# Psh
0
# RHO_L CL ALPHA_L NU_L LAMBDA_ON_RHO_L
1e-6 2.089 0 .00089 0
# RHO_G GAMMA P0 NU_G LAMBDA_ON_RHO_G
1.22E-9 1.4 .1e-3 .014607 0- Z displacement component fixed for lower and upper faces
- Y displacement component fixed for lateral faces normal to Y
- X displacement component fixed for lateral faces normal to X
An interface TYPE18 is defined to manage the contact between the solid in Lagrangian mesh (Prism) and the fluid (pool). The diedra is defined as main and the nodes in the pool (air and water) as secondary.
The interface TYPE18 forces are computed by Penalty method. The interface stiffness is proportional to impact velocity. The results obtained by the ALE approach can be highly dependent to the interface stiffness factor Stfac, which should be adjusted in function of size of element and fluid properties.
Results
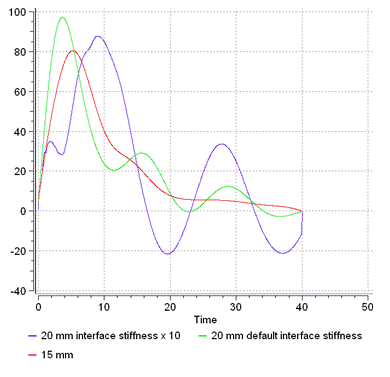
Figure 2. Higher Peak Force with Coarse Mesh and Interface Stiffness Dependence
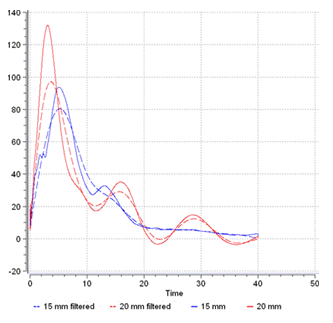
Figure 3. Filtering of Results for Coarse and Fine Meshes
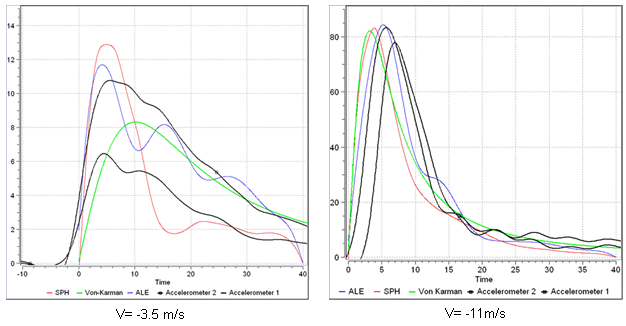
Figure 4. Comparison Between Simulation Results, Theoretical Solution and Experimental Measures (acceleration)
SPH and ALE approaches respectively give the maximum acceleration of 83g and 84g. However, the Von Karman theory delivers 82g; with the maximum value by experience is between 83g and 73g.
- The computation time is similar for both SPH and ALE approaches.
- Using a fine enough mesh, both Radioss methods SPH and ALE provide satisfactory results, compared to experience and analytical solution.
- The ALE approach is more robust and stable when the SPH signal is highly vibrated.
- The use of a coarse mesh in the ALE approach requires the interfaced stiffness calibration.