可変形ボディ
マルチボディシステムにおける可変形ボディは、システムのボディの弾性変形をモデル化するために使用できるボディです。可変形ボディは、隣接する要素またはボディに結合点を介して結合されます。可変形ボディは、さまざまな方法で縮退した剛性マトリクスと質量マトリクスで構成されています。一般的な手法として、Craig-Bampton MethodとCraig-Chang Methodの2つがあります。
-
現時点でBodiesパネルが表示されていない場合は、Project Browserまたはmodeling windowで目的のボディをクリックして選択します。
Bodiesパネルが自動的に表示されます。
-
PropertiesタブでFlex Body (CMS)ボックスにチェックマークを入れ、モデルを弾性にします。
Note: 選択したボディがペアエンティティの場合は、まず、パネルでLeftタブとRightタブを区別してから、プロパティを編集します。Symmetric propertiesは、可変形体ペアには適用できません。剛体ペアを弾性体(CMS)に変更する前に、Symmetric Propertiesを非アクティブにします。Tip:
- アニメーションスケールは、モード形状をアニメーション化するためのスケールファクターです。この情報は、アニメーションファイルを作成するためにのみ使用し、ソルバー解析には必要ありません。
- modeling windowに弾性体を表示するグラフィックファイルを参照します。
- 弾性体データにある質量慣性プロパティを持つ剛体として弾性体を考慮する場合は、Rigidifyチェックボックスをアクティブにします。
- 幾何学的剛性データを扱う場合は、Include geometric stiffeningチェックボックスをアクティブにします。このオプションは、弾性体H3Dに幾何学的剛性データが存在する場合にのみアクティブになります。このオプションは、MotionViewのソルバーモードでのみ使用できます。
- フォルダアイコンをクリックして、OptiStructで弾性体プロパティファイル(H3Dファイル)を参照して選択します。
-
PropertiesタブでNodesをクリックします。
Nodesダイアログが表示されます。
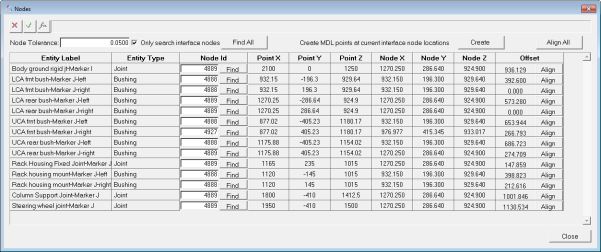
Figure 1.マーカーごとに、結合しているエンティティと可変形ボディとのインターフェースとして機能する節点を指定する必要があります。
-
可変形ボディで結合点を探します。
- Find Allをクリックすると、可変形ボディに結合しているエンティティのすべてのマーカーごとに、それに最も近い結合点がMotionViewによって検索されます。
- Findをクリックして、マーカーごとの結合点を探します。
Note: 可変形ボディの弾性体H3Dファイルには、2種類の節点として結合点と非結合点が収められています。結合点は、弾性体ファイルの作成時に結合点として選択された節点です。これらは、モデルの他の部分に弾性体を結合する節点です。Only search interface nodesチェックボックスは、結合点のみを検索することを指定します。これにより、節点がすばやく見つかります。 -
見つかった結合点を確認します。
ポイント座標と節点座標との差を示すOffset列に値0.000または0.001が表示されることがあります(一般的に、有効桁の丸め誤差によって、この2つの値が発生します)。この場合は、結合点の座標とマーカー原点の座標が同じであることを意味します。
このオフセット値が著しく大きい場合は、結合しているエンティティ、可変形ボディの位置、および節点座標の位置を見直すことをお勧めします。大きいオフセット値は、ソルバーに問題を引き起こしたり、間違った結果をもたらしたりする可能性があります。
-
ポイントの座標を節点の座標に揃えるには、各行の末尾にあるAlignボタンをクリックします。
CAUTION:このオプションは、結合しているエンティティによって参照されているポイントの位置を変更したり、他のエンティティ定義に影響をもたらしたりする場合があるため、慎重に使用する必要があります。
-
結合点の位置にポイントを作成するには、ダイアログの右上にあるCreateをクリックします。
可変形ボディと相互作用するジョイントまたはその他の要素を追加するために、結合点の位置にポイントを作成する必要がある場合、この機能が特に役立ちます。
- すべての操作が完了したら、Closeをクリックしてダイアログを終了します。
- Deformable BodyパネルでModesをクリックして、Modesダイアログを表示します。
-
ドロップダウンメニューを使用して、必要な可変形ボディモード減衰タイプを選択します。
Note: Modesダイアログには、可変形ボディに属しているモードが表示され、モデル周波数に関する情報も提供されます。周波数が0か0に近い最初の6つのモードは、デフォルトでは選択されていません。これは、MotionSolveでモデルを解析する場合は可変形ボディの剛体モードを使用する必要があるためです。さらに、モデルで扱うべきではないと思われるモードを非アクティブにすることができます。これを実行できるのは上級ユーザーのみです。
- Data Summaryダイアログを使用して、複数のボディのプロパティを同時に編集できます。
- FEM Inertia Propsタブをクリックします。
- 質量、慣性テンソル、およびCMの値を入力します。
-
ボディの座標系を定義します。
- Body Coordsysタブをクリックします。
- Use body coordinate systemチェックボックスをクリックします。
- Pointをクリックして、modeling windowまたはModel Treeで目的の項目を選択します。
- 方向オプションを使用して座標系の方向を指定します。
-
初期条件を定義します。
- パネルでInitial Conditionsタブをクリックします。
- 必要なチェックボックスをアクティブにして、並進速度と回転速度の値を入力します。
-
VMとWMとして使用するマーカーを選択します。
Note: ボディの並進初期条件は、一意のVM(線形速度参照マーカー)が存在しない場合、グローバル参照フレームを基準とするものと見なされます。回転初期条件は、一意のWM(角速度参照マーカー)が存在しない場合、重心マーカーを回転中心として適用されます。