Couplers
Couplerエンティティは、2つまたは3つのジョイントの自由度の間の代数的関係を定義します。
この拘束要素を使用すると、理想化された平歯車、ラックギアとピニオンギア、およびディファレンシャルギアを、一連のジョイント内の複数の変位を関連付けるシンプルな拘束としてモデル化できます。カプラーは、並進ジョイント、回転ジョイント、および円筒ジョイント間の関係のみの指定に使用できます。
Couplerジョイントを定義するために必要なトポロジ情報を以下の図に示します:
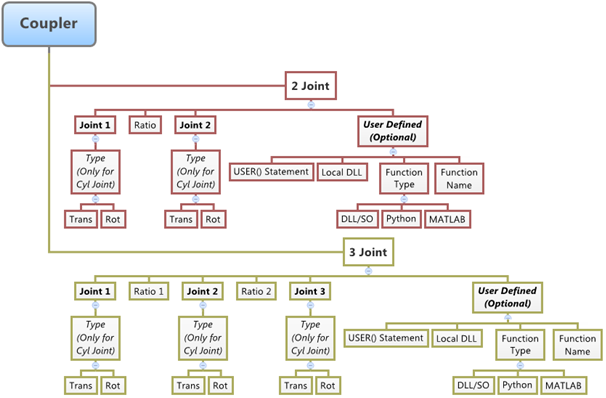
Figure 1.
Figure 1.
カプラーの作成
カプラーの編集
カプラーに対するユーザー定義プロパティの使用
必要に応じて、User-Definedタブを使用してカプラーを定義します。これにより、ユーザーサブルーチンを使用してカプラーのプロパティを指定できます。