Bodies
Bodiesツールを使用して、剛体、ポイント質量ボディ、可変形ボディ / 弾性体を作成および編集します。
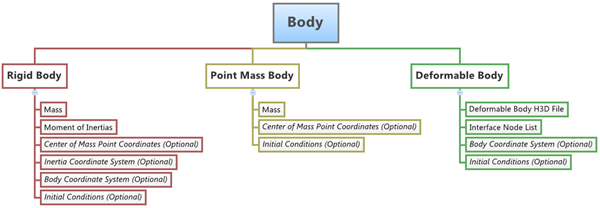
Figure 1.
剛体
マルチボディシステムにおける剛体とは、変形が重要でないか無視できる、サイズと形状が固定されたソリッドボディまたはパートを理論的に表現したものです。つまり、ボディ上の任意の2点間の距離が、そこに作用する外部フォースに関係なく、変化しないボディの理論的な表現です。
剛体は6つの自由度(DOF)を持つため、マルチボディシステムに剛体を追加するたびにシステムに6つの自由度が追加されます。
剛体には、移動可能なものと固定されているものの2種類があります。固定タイプの剛体はグラウンドボディとも呼ばれています。グラウンドボディはニュートン参照フレームを表しています。デフォルトおよび定義では、これは完全に静止しています。MotionViewでは、デフォルトで各モデルにグラウンドボディが存在します。
可変形ボディ(弾性体、Flexibleボディとも呼ばれる)
マルチボディシステムにおける可変形ボディは、システムのボディの弾性変形をモデル化するために使用できるボディです。可変形ボディは、結合点を介して隣接する要素 / ボディに結合されます。可変形ボディは、さまざまな方法で計算される縮退剛性 / 質量マトリクスで構成されています。一般的な手法として、Craig-Bampton MethodとCraig-Chang Methodの2つがあります。
可変形ボディのプロパティは、弾性体H3Dファイルを使用して定義されます。弾性体H3Dファイルは、FE解析のComponent Mode Systems Methodを使用して作成されます。弾性体H3Dファイルは、Altair OptiStructのFEソルバーを使用して作成することもできます。MotionViewでは、Utility Flexbody Prepを使用して、FEモデルから弾性体ファイルを作成できます。
MotionViewは、上述のボディタイプの単一ボディまたはペアボディとして作成できます。ペアボディの場合、プロパティを全体座標系Z-Xプレーンに対して対称にすることができます(可変形ボディのペアを除く)。
ポイント質量
ポイント質量ボディは、6DOF剛体の縮小版です。ポイント質量ボディの自由度は3つの並進自由度のみなので、ボディの質量はありますが、慣性のプロパティはありません。質点の位置は質量中心点によって定義されます。デフォルトでは、ポイント質量の方向は、全体座標系と同じになるように設定されます(シミュレーション中に変更されることはありません)。ポイント質量エンティティの目的は、付加質量(例えば、シート上の運転者の質量)を別のボディに追加することです。
NLFEボディ
NLFEは非線形有限要素(Non Linear Finite Element)の略です。MotionView/MotionViewでのNLFE実装は、絶対節点座標法(ANCF)に基づきます。このアプローチでは、無限小回転や有限回転を使用せずに、絶対座標と全体勾配のみを使用して、要素節点座標が定義されます。
複雑なマルチボティシミュレーションでは、モデルの忠実度を高めるために弾性体が必要です。変形や回転が大きくなる、または線形仮定を逸脱することが想定される場合は、NLFEが必要になります。NLFEは、ケーブル、ベルト駆動、リーフスプリング、トーションビーム、スタビライザーバー、コイルばねなどのさまざまな用途で使用できます。
これに加えて、NLFEを使用する場合は、モデル内で使用する前に縮退解析を実行する必要がありません。また、この実装は非常にシンプルで、ユーザーは従来のFE法よりもはるかに短時間でサブシステムをモデル化することができます。このすべてにより、モデル解析のターンアラウンドタイムが短縮されます。