Joints
基本的なジョイントを作成して編集するにはJointsツールを使用します。
ジョイントは、低次ペア拘束を作成します。低次ペアは拘束の理想的なフォームで、ここでは2つの異なるボディに属する2つの参照フレーム(または座標系)を使用して拘束を表すことができます。1つの参照フレームの原点、軸、または平面が、別の参照フレームの原点、軸、または平面に関連付けて拘束されるということです。例えば、並進ジョイントは、1つのボディ上の1つのポイントを、別のボディの座標平面に対して拘束します。この場合、そのポイントは座標系のベクトルに沿って移動できるだけです。ボディは、1つの並進自由度のみが与えられ、残り2つの並進自由度とすべての回転自由度は制限されるものとされます。
次の図は、MotionViewでサポートされる各種ジョイントを示しています。
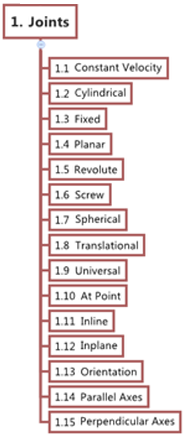
Figure 1.
MotionViewのジョイントは、コンプライアントと非コンプライアントの間で切り替えることが可能です。
- コンプライアントジョイント
- コンプライアントジョイントはブッシュと同じで、6つの全自由度における相対運動が可能です。相対運動は、コンプライアントジョイントの剛性と減衰に左右されます。ジョイントをコンプライアントにするには、ジョイント作成の際にAllow complianceオプションを有効にする必要があります。
- 非コンプライアントジョイント
- 非コンプライアントジョイントは、純粋な拘束条件として機能し、その特定のジョイントタイプの自由度間での相対運動のみを可能とします。
Note: ジョイントとブッシュでは結合と方向に関する情報がまったく同じです。ジョイントでは2つのボディ間に剛性どうしの拘束の組み合わせが適用され、ブッシュではボディ間に柔軟な拘束が適用されます。
- プリミティブの拘束
-
ジョイントプリミティブタイプ 並進DOFの除去数 回転DOFの除去数 DOFの合計除去数 Atpoint 3 0 3 Inline 2 0 2 Inplane 1 0 1 Orientation 0 3 3 Parallel Axis 0 2 2 Perpendicular 0 1 1 - ジョイントの拘束
-
ジョイントタイプ 除去される並進自由度 除去される回転自由度 除去される回転自由度の合計 Ball 3 0 3 Constant Velocity 3 1 4 Cylindrical 2 2 4 Fixed 3 3 6 Planar 1 2 3 Point to Curve 2 0 2 Revolute 3 2 5 Translational 2 3 5 Universal 3 1 4