Markers
Markersツールを使用して座標系と参照フレームを作成します。
マーカーエンティティは、MotionViewにおける直交右手座標系および参照フレームです。マーカーはボディに属する必要があります。所属先のボディは、剛体、弾性体、質点のいずれのタイプでもかまいません。グローバル原点にあるグラウンドボディ(ニュートン参照フレーム)に属するデフォルトのマーカーをグローバルフレームと呼びます。
マーカーを定義するために必要なトポロジ情報を以下の図に示します。
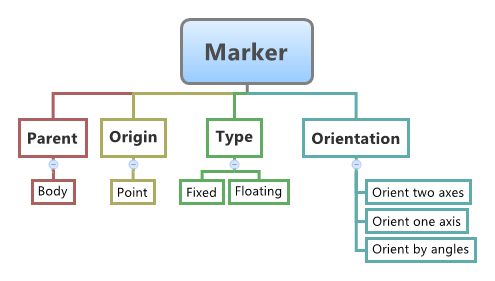
Figure 1.
- ノンフローティング(シングルまたはペア)
- フローティング(シングルまたはペア)
ボディに属する固定マーカーは、そのボディの参照フレームを基準として固定されます。マーカーをボディに結合するには、位置と方向を指定する必要があります。
フローティングマーカーは、ボディに属していても、そのボディの参照フレーム内に固定されることはありません。フローティングマーカーは通常、ベクトル、フォース、ブッシュなどのエンティティで使用されます。
マーカーは、マルチボディシステムにおける主要エンティティの1つです。マルチボディシステムを構成するエンティティはすべて、ソルバーでマーカーを使用して表されます。例えば、CGマーカーは、指定されたマーカー位置にあるボディを表し、質量はCGマーカーの原点に位置すると見なされます。回転ジョイントは、2つのマーカー(IマーカーとJマーカー)の間で5つの方向に拘束を強制することによって表されます。これらのマーカーが2つのボディ上にあり、それらの間でジョイントが定義されます。フォースなどその他のエンティティについても、同様の概念があります。ベクトル、フォース、ブッシュなどのエンティティでは、JマーカーをIマーカーと一致させる必要があります。Jマーカーはそのボディ参照フレームを基準として移動する必要があるため、このようなマーカーはフローティングマーカーとして定義されます。
ボディ、ジョイント、フォースなどのエンティティをMotionViewで定義する場合、マーカーは暗黙的に作成されます。ただし、マーカーを明示的に作成する必要がある場合もあります。例えば、他のエンティティがない特定の位置に出力を定義する場合や、フォースの参照フレームを定義する場合です。
マーカーの作成
マーカーは、適用される荷重や出力リクエストの参照として使用される、ボディに付加される座標系です。
マーカーの編集
関連付けられたボディの指定と原点の指定のほか、マーカーを定義するための軸のルールを指定する必要があります。