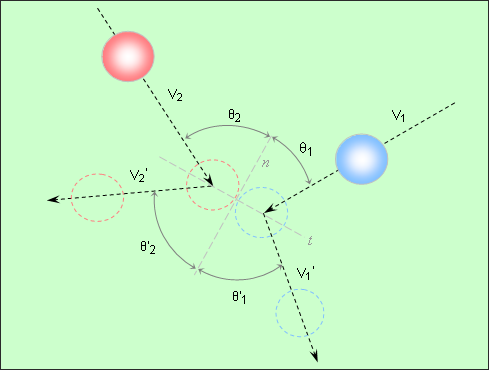
The balls' behavior is described using the parameters (angles and velocities) shown in Figure 1. The numerical results are compared with the analytical
solution, assuming a perfect elastic rebound (coefficient of restitution is equal to
1). Figure 1. Problem Data
Initial Values
V1
0.7m.s-1
V2
1m.s-1
1
40°
2
30
massball
44.514g
Model Method
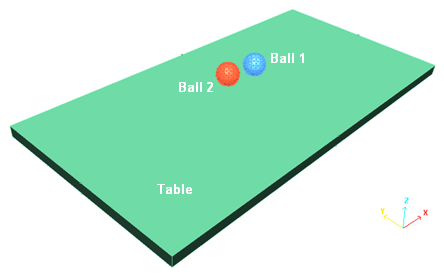
The balls and the table have the same properties, previously defined for a pool game.
The dimensions of the table are 900 mm x 450 mm x 25 mm and the balls' diameter is
50.8 mm. The balls and the table are meshed with 16-node thick shell elements for
using the TYPE16 Lagrangian interface. Figure 2. Mesh of the Problem (16-node thick shells)
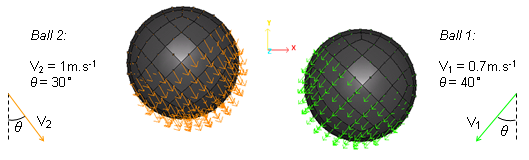
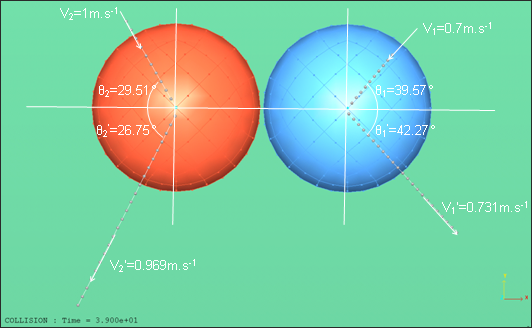
The initial translational velocities are applied to the balls in the
/INIV Engine option. Velocities are projected on the X and Y
axes. Figure 3. Initial Velocities Applied on the Balls (initial position)
Gravity is considered for the balls (0.00981 mm.ms-2 ).
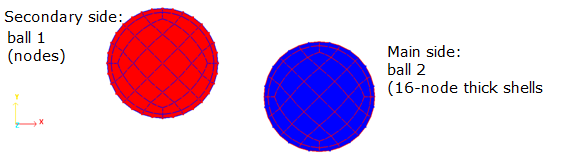
The ball/ball and balls/table contact is modeled using the TYPE16 interface
(secondary nodes/main 16-node thick shells contact). The interface defining the
ball/ball contact is shown in Figure 4. Figure 4. Main and Secondary Sides for the TYPE 16 Lagrangian Interface
Analytical Solution
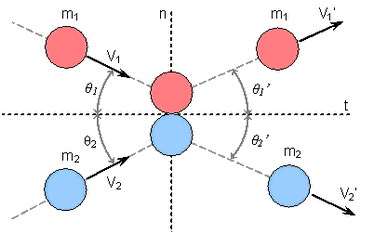
Take two balls, 1 and 2 from masses and , moving in the same plane and approaching each other
on a collision course using velocities and , as shown in Figure 5. Figure 5. General Problem of Collision Between Two Balls
Velocities are projected onto the local axes and . To obtain the velocities and their direction after
impact, the momentum conservation law is recorded for the two balls:(1)
Or(2)
The shock is presumed elastic and without friction. Maintaining the translational
kinetic energy is respected as there is no rotational energy:(3)
Such equality implies that the recovering capacity of the two balls corresponds to
their tendency to deform.
This condition equals one of the elastic impacts, with no energy loss. Maintaining
the system's energy gives:(4)
This relation means that the normal component of the relative velocity changes into
its opposite during the elastic shock (coefficient of restitution value e is equal
to the unit).
The following equations must be checked for normal components:(5)
The equations system using V'1 and V'2 as unknowns is easily
solved:(6)
It should be noted that these relations depend upon the masses ratio.
As the balls do not suffer from velocity change in the t-direction, maintaining the
tangential component of each sphere's velocity provides:(7)
The norms of velocities after shock result from the following
relations.(8)(9)
In this example, balls have the same mass: m1 = m2.
Therefore, and .
The norms of the velocities are given using the following relations, depending on the
initial velocities and angles. Used to determine the analytical solutions (angles
and velocities after collision):(10)(11)
By recording the projection of the velocities, directions after shock can be
evaluated using relation. Used to determine the analytical solutions (angles and
velocities after collision):(12)(13)
Results
Numerical Results Comparison with the Analytical Solution
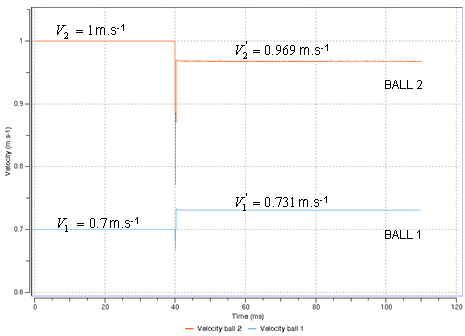
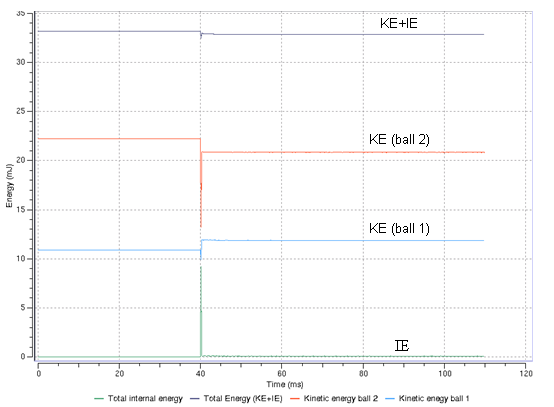
Figure 6 shows the trajectories of the balls' center point obtained using
numerical simulation before and after collision. Figure 6. Trajectories of Balls (center of gravity) Figure 7. Variation of Velocities (collision at 40 ms) Figure 8. Energy Assessment
For given initial values of , , 1 and 2, simulation results are reported in Table 1.
Table 1. Comparison of Results for After Collision
Numerical Results
Analytical Solution
1'
42.27°
44.72°
2'
26.75°
26.48°
V 1'
0.731 m/s
.731 m/s
V 2'
0.969 m/s
0.977 m/s
Conclusion
The simulation corroborates with the analytical solution. The 16-node thick shells are
fully-integrated elements without hourglass energy. This modeling provides a good
transmission of momentum. However, the TYPE16 interface does not take into account
the quadratic surface on the secondary side (ball 2), due to the node to thick shell
contact. Accurate results are obtained for a collision without penetrating the
quadratic surface of the secondary side in order to confirm impact between the
spherical bodies.