Rigid to Rigid Contact
Rigid to Rigid Contactでは、3Dフレームまたは2D平面で互いを基準として運動する2つの剛体間の接触力を捕捉します。
3D剛体間接触の結合性の定義
Connectivityで、接触に関与するボディやグラフィックスを定義できます。接触に対するグラフィックスの適合性をチェックすることもできます。
-
選択したボディごとに、接触に関与するグラフィックスを、ボディの下に表示されたリストから選択します。
ボディ上の使用可能なグラフィックスはすべて自動的に、その接触用に選択されます。個々のグラフィックスは、リスト内の各グラフィックエンティティの横にあるチェックボックスを使って個別に選択 / 選択解除できます。
または、Graphicコレクターをクリックしてアクティブにしてから、必要な形状をmodeling windowで選択します。
Tip:- Graphicコレクターの下にあるAll
 、None
、None  、およびReverse
、およびReverse  の各オプションを使用すれば、接触に使用するグラフィックス群を迅速に選択できます。
の各オプションを使用すれば、接触に使用するグラフィックス群を迅速に選択できます。 - Material Insideをクリックして、グラフィックの材料がボリュームの内側にあるのか外側にあるのかを指定します。このオプションを選択した場合は、選択した形状がソリッドであることを意味します。すなわち、その形状は材料で満たされており、その外側には材料はありません。したがって、その形状のサーフェス法線は、外側を指します。このオプションが選択されていない場合、これは、逆が真であることを意味します: すなわち、形状の外側は材料で満たされ、内側に材料はありません。この場合、その形状のサーフェス法線は、内側を指します。このフラグは、接触のシミュレーションで形状のサーフェス法線を逆転させるのに役立ちます。
- サーフェスメッシュの接触の方向を可視化するにはHighlight contact sideをアクティブにします。接触しているサーフェスの側は赤色で、材料の側は青色で示されます。
- サーフェスメッシュにある不連続性(オープンエッジやT接合など)を可視化するにはHighlight mesh errorsをアクティブにします。オープンエッジは赤いラインで、T接合は青いラインでハイライト表示されます。視認性を高めるには、関連するグラフィックコンポーネントの描写を影なしモードに切り替えます。Note: メッシュエラーが検出されなかった場合は、このオプションが無効になり、No mesh errorsが表示されます。
- Graphicコレクターの下にあるAll
その他のコメント:
- ADAMSソルバーモードでは、定義したグラフィックがファイルタイプグラフィックの場合、追加のパラソリッドファイルが必要になります。
- 接触に関連する個々のグラフィックスは、閉じたボリュームを形成する必要があります。すなわち、グラフィックメッシュには、オープンエッジやT接合が含まれていてはいけません。オープンエッジやT接合をチェックするには、Highlight mesh errorsオプションを使用します。
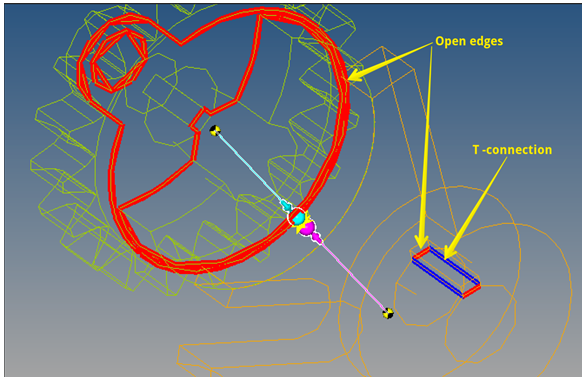
Figure 1. - メッシュの法線は、接触の方向を指していなければなりません。法線の向きがビューアーを指しているように見える際、サーフェスメッシュの側は、接触の側です。反対方向から見ている場合、それは材料側と呼ばれます。正しい接触の方向を設定するには、パネル内のMaterial InsideおよびHighlight contact sideオプションを使用します。以下は、Material InsideおよびHighlight contact sideオプションがどのように働くかの例です:
Figure 2. 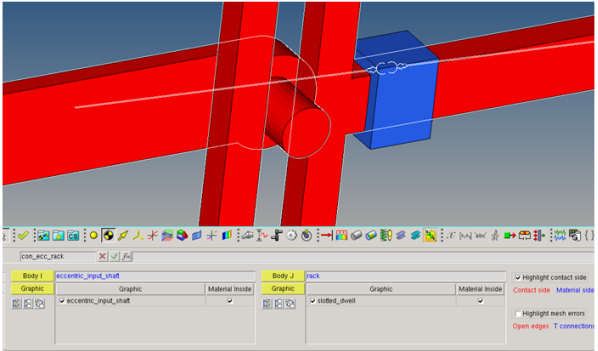
両方のグラフィックスでMaterial Insideオプションをアクティブにしている場合、Highlight contact sideオプションにチェックマークを入れると、グラフィックスの外側から見たときにこれら両方のグラフィックスが赤色で表示されます。
特定のケースで接触の方向が逆である場合、Material Insideフラグは逆転され得ます。
接触シミュレーションを正常に実行できるようにモデルを構築する方法については、MotionSolveで3次元接触モデルを実行するための最良の方法をご参照ください。
2D剛体間接触の結合性の定義
Connectivityで、2D接触に関与するボディやグラフィックスを定義できます。接触に対するグラフィックスの適合性をチェックすることもできます。
-
選択したボディごとに、接触に関与するグラフィックスを、ボディの下に表示されたリストから選択します。
ボディ上の使用可能なグラフィックスはすべて自動的に、その接触用に選択されます。個々のグラフィックスは、リスト内の各グラフィックエンティティの横にあるチェックボックスを使って個別に選択 / 選択解除できます。
または、Graphicコレクターをクリックしてアクティブにしてから、必要な形状をグラフィックスウィンドウで選択します。
Tip:- Graphicコレクターの下にあるAll 、None 、およびReverse の各オプションを使用すれば、接触に使用するグラフィックス群を迅速に選択できます。
- Flip Contact Sideをクリックして、接触するカーブグラフィックの側部を指定します。矢印で指されるカーブの側は、その接触する側を示しています。このフラグを変更すると、接触の方向が逆になります。
- カーブの接触の方向を可視化するにはHighlight contact sideをアクティブにします。
- 接触に関与するカーブの平坦性をチェックするにはIdentity Planarityをアクティブにします。このツールでは、Body Iで基準として最初に選択したグラフィックを考慮しながら、各カーブが平坦かどうかと、カーブどうしが同一平面上にあるかどうかがチェックされます。
- Graphicコレクターの下にあるAll
- 2次元接触に関連した個々のカーブグラフィックスは、平面のカーブのみを使用していなければなりません。平面のカーブは、そのデータポイントをすべて単一の平面内に有します。
- 現時点で、MotionViewでは、2D接触に使用可能なカーブグラフィックスの作成で、3Dデカルト / パラメトリックカーブのみをサポートしています。以下は、Highlight contact sideオプションがどのように働くかの例です:
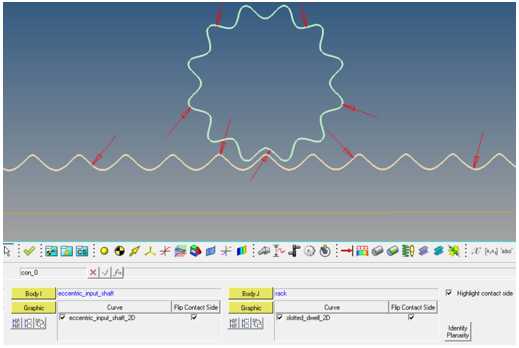
Figure 3.上の例は、カーブ群とそれらの間に定義された2次元接触を含んだラックとピニオンを示しています。矢印が指している(外側の)ピニオンの側は、接触する可能性がある側を示しています。同様に、ピニオンカーブ上の矢印は、外側からそれを指している矢印群を有しています。
外側から接触する可能性がある場合、Flip Contact Sideオプションを使用することができます。
剛体間接触のプロパティの定義
垂直力と摩擦力の計算に使用するパラメータは、Propertiesタブで定義します。
- Propertiesタブをクリックします。
- パネルの一番上にあるタブを使用して、垂直力と摩擦力を区別します。
垂直力
このセクションは、選択された接触の垂直力を計算する方法および関連のプロパティを編集するために使用されます。垂直力を定義するための4つのモデルとして、Impact、Poisson、Volume、およびUser-Definedがサポートされています。
摩擦力
このタブを使用して、接触力の計算でクーロン摩擦を考慮するかどうかに関する各種オプションを指定します。
剛体間接触の高度なオプションの定義
Advancedタブには、MotionSolveでのシミュレーション中に接触イベントを制御するための高度なオプションが用意されています。