/PROP/TYPE8 (SPR_GENE)
Block Format Keyword This spring property works with six independent modes of deformation. This spring accounts for nonlinear stiffness, damping and different unloading.
Deformation, force and energy based failure criteria are available. The general spring property is often used to model a joint connection between two parts.
Format
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| /PROP/TYPE8/prop_ID/unit_ID or /PROP/SPR_GENE/prop_ID/unit_ID | |||||||||
| prop_title | |||||||||
| Mass | I | Skew_ID | sens_ID | Isflag | Ifail | Ifail2 | Iequil | ||
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| K1 | C1 | A1 | B1 | D1 | |||||
| fct_ID11 | H1 | fct_ID21 | fct_ID31 | fct_ID41 | |||||
| F1 | E1 | Ascale1 | Hscale1 | ||||||
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| K2 | C2 | A2 | B2 | D2 | |||||
| fct_ID12 | H2 | fct_ID22 | fct_ID32 | fct_ID42 | |||||
| F2 | E2 | Ascale2 | Hscale2 | ||||||
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| K3 | C3 | A3 | B3 | D3 | |||||
| fct_ID13 | H3 | fct_ID23 | fct_ID33 | fct_ID43 | |||||
| F3 | E3 | Ascale3 | Hscale3 | ||||||
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| K4 | C4 | A4 | B4 | D4 | |||||
| fct_ID14 | H4 | fct_ID24 | fct_ID34 | fct_ID44 | |||||
| F4 | E4 | Ascale4 | Hscale4 | ||||||
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| K5 | C5 | A5 | B5 | D5 | |||||
| fct_ID15 | H5 | fct_ID25 | fct_ID35 | fct_ID45 | |||||
| F5 | E5 | Ascale5 | Hscale5 | ||||||
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| K6 | C6 | A6 | B6 | D6 | |||||
| fct_ID16 | H6 | fct_ID26 | fct_ID36 | fct_ID46 | |||||
| F6 | E6 | Ascale6 | Hscale6 | ||||||
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| Fsmooth | Fcut | ||||||||
Definitions
| Field | Contents | SI Unit Example |
|---|---|---|
| prop_ID | Property
identifier (Integer, maximum 10 digits) |
|
| unit_ID | Unit Identifier (Integer, maximum 10 digits) |
|
| prop_title | Property
title (Character, maximum 100 characters) |
|
| Mass | Mass (Real) |
|
| I | Inertia (Real) |
|
| Skew_ID | Skew system identifier. If
not defined, then global coordinate system is
used. (Integer) |
|
| sens_ID | Sensor
identifier (Integer) |
|
| Isflag | Sensor flag. 12
(Integer) |
|
| Ifail | Failure criteria.
(Integer) |
|
| Ifail2 | Failure model flag. 4
(Integer) |
|
| Iequil | Equilibrium flag. 2
(Integer) |
|
| K1 | Transitional stiffness
(for linear spring) or unloading stiffness (for elasto-plastic
spring). 6 (Real) |
|
| C1 | Transitional damping for
translation in X. (Real) |
|
| A1 | Coefficient in strain rate
effect in direction X (homogeneous to a force). Default = 1.0 (Real) |
|
| B1 | Logarithmic coefficient in
strain rate effect in direction X (homogeneous to a
force). (Real) |
|
| D1 | Scale coefficients for
translational velocity in X. Default = 1.0 (Real) |
|
| fct_ID11 | Function identifier
defining
transition in X.
If H1 = 4: Function identifier defining upper yield curve (Integer) |
|
| H1 | Transitional hardening flag.
(Integer) |
|
| fct_ID21 | Function identifier
defining
transition in
X. (Integer) |
|
| fct_ID31 | Function used only for
unloading for translation in X. If H1 = 4: Function identifier defining lower yield curve (transitional). If H1 = 5: Function identifier defining residual displacement vs maximum displacement. If H1= 6: Function identifier defining nonlinear unloading. If H1= 7: Function identifier unloading curve for force vs displacement (relative displacement). (Integer) |
|
| fct_ID41 | Function identifier
defining
for translation in
X. (Integer) |
|
| Negative failure
displacement, transitional. Default = -1030 (Real) |
||
| Positive failure
displacement, transitional. Default = 1030 (Real) |
||
| F1 | Scale factor for
, transitional for translation in
X. (Real) |
|
| E1 | Coefficient for strain
rate effect in direction X (homogeneous to a
force). (Real) |
|
| Ascale1 | Abscissa scale factor for
(fct_ID11 and fct_ID13). Default = 1 (Real) |
|
| Hscale1 | Coefficient for fct_ID41 used for
translation in X (homogeneous to a force). Default = 1 (Real) |
|
| K2 | Transitional stiffness
(for linear spring) or unloading stiffness (for elasto-plastic
spring) for translation in Y. (Real) |
|
| C2 | Transitional damping for
translation in Y. (Real) |
|
| A2 | Coefficient for strain
rate effect in direction Y (homogeneous to a force). Default = 1.0 (Real) |
|
| B2 | Logarithmic coefficient
for strain rate effect in direction Y (homogeneous to a
force). (Real) |
|
| D2 | Scale coefficients for
translation velocity in Y. Default = 1.0 (Real) |
|
| fct_ID12 | Function identifier
defining f(
) transition in Y.
If H2 = 4: Function identifier defining upper yield curve (Integer) |
|
| H2 | Transitional hardening flag.
(Integer) |
|
| fct_ID22 | Function identifier
defining
transition in
Y. (Integer) |
|
| fct_ID32 | Function used only for
unloading for translation in Y. If H2 = 4: Function identifier defining lower yield curve (transitional) If H2 = 5: Function identifier defining residual displacement vs maximum displacement If H2= 6: Function identifier defining nonlinear unloading. If H2= 7: Function identifier unloading curve for force vs displacement (relative displacement) (Integer) |
|
| fct_ID42 | Function identifier
defining
for translation in
Y. (Integer) |
|
| Negative failure
displacement, transitional. Default = -1030 (Real) |
||
| Positive failure
displacement, transitional Default = 1030 (Real) |
||
| F2 | Scale factor for
, transitional in translation in
Y. (Real) |
|
| E2 | Coefficient for strain
rate effect in direction Y (homogeneous to a
force). (Real) |
|
| Ascale2 | Abscissa scale factor for
(fct_ID12 and fct_ID32) for
translation in Y. Default = 1 (Real) |
|
| Hscale2 | Coefficient for fct_ID42 for
translation in Y (homogeneous to a force). Default = 1 (Real) |
|
| K3 | Transitional stiffness
(for linear spring) or unloading stiffness (for elasto-plastic
spring) for translation in Z. (Real) |
|
| C3 | Transitional
damping (Real) |
|
| A3 | Coefficient for strain
rate effect in direction Z (homogeneous to a force). Default = 1.0 (Real) |
|
| B3 | Logarithmic coefficient
for strain rate effect in direction Z (homogeneous to a
force). (Real) |
|
| D3 | Scale coefficient for
translation velocity in direction Z. Default = 1.0 (Real) |
|
| fct_ID13 | Function identifier
defining f(
) transitional in Z.
If H3 = 4: Function identifier defining upper yield curve (Integer) |
|
| H3 | Transitional hardening flag.
(Integer) |
|
| fct_ID23 | Function identifier
defining g(
) transition in Z. (Integer) |
|
| fct_ID33 | Function used only for
unloading for translation in Z. If H3 = 4: Function identifier defining lower yield curve (transitional) If H3 = 5: Function identifier defining residual displacement vs maximum displacement If H3 = 6: Function identifier defining nonlinear unloading curve If H3= 7: Function identifier unloading curve for force vs displacement (relative displacement) (Integer) |
|
| fct_ID43 | Function identifier
defining
for translation in
Z. (Integer) |
|
| Negative failure
displacement, transitional. Default = -1030 (Real) |
||
| Positive failure
displacement, transitional. Default = 1030 (Real) |
||
| F3 | Scale factor for
, transitional for translation in
Z. (Real) |
|
| E3 | Coefficient for strain
rate effect in direction Z (homogeneous to a
force). (Real) |
|
| Ascale3 | Abscissa scale factor for
(fct_ID13 and fct_ID33). Default = 1 (Real) |
|
| Hscale3 | Coefficient for fct_ID43 for
translation in Z (homogeneous to a force). Default = 1 (Real) |
|
| K4 | Rotational stiffness (for
linear spring) or unloading stiffness (for elasto-plastic spring)
for torsion in X. (Real) |
|
| C4 | Rotational damping for
torsion in X. (Real) |
|
| A4 | Coefficient for strain
rate effect torsion in X (homogeneous to a moment). Default = 1.0 (Real) |
|
| B4 | Logarithmic coefficient
for strain rate effect in torsion X (homogeneous to a
moment). (Real) |
|
| D4 | Scale coefficients for
torsion velocity in X. Default = 1.0 (Real) |
|
| fct_ID14 | Function identifier
defining f(
), rotational for torsion in X.
If H4 = 4: Function identifier defining upper yield curve (Integer) |
|
| H4 | Rotational hardening flag.
(Integer) |
|
| fct_ID24 | Function identifier
defining
, rotational for torsion in
X. (Integer) |
|
| fct_ID34 | Function used only for
unloading for torsion in X. If H4 = 4: Function identifier defining lower yield curve, rotational If H4 = 5: Function identifier defining residual displacement vs maximum displacement If H4 = 6: Function identifier defining nonlinear unloading curve If H4= 7: Function identifier defining unloading curve of moment vs rotation (Integer) |
|
| fct_ID44 | Function identifier
defining
for torsion in
X. (Integer) |
|
| Negative failure
rotation. Default = -1030 (Real) |
||
| Positive failure
rotation Default = 1030 (Real) |
||
| F4 | Scale factor for
, rotational for torsion in
X. (Real) |
|
| E4 | Coefficient for strain
rate effect for torsion in X (homogeneous to a
moment). (Real) |
|
| Ascale4 | Abscissa scale factor for
for torsion in X (fct_ID14 and fct_ID34). Default = 1 (Real) |
|
| Hscale4 | Coefficient for fct_ID44 for torsion
in X (homogeneous to a force). Default = 1 (Real) |
|
| K5 | Rotational stiffness (for
linear spring) or unloading stiffness (for elasto-plastic spring)
for rotation in Y. (Real) |
|
| C5 | Rotational damping for
rotation in Y. (Real) |
|
| A5 | Coefficient for strain
rate effect, rotation in Y (homogeneous to a moment). Default = 1.0 (Real) |
|
| B5 | Logarithmic coefficient
for strain rate effect, rotation in Y (homogeneous to a
moment). (Real) |
|
| D5 | Scale coefficients for
rotation velocity in Y. Default = 1.0 (Real) |
|
| fct_ID15 | Function identifier
defining f(
), rotational for torsion in Y.
If H5 = 4: Function identifier defining upper yield curve (Integer) |
|
| H5 | Rotational hardening flag.
(Integer) |
|
| fct_ID25 | Function identifier
defining
, rotation for in
Y. (Integer) |
|
| fct_ID35 | Function used only for
unloading for rotation in Y. If H5 = 4: Function identifier defining lower yield curve, rotational If H5 = 5: Function identifier defining residual rotation vs maximum rotation If H5 = 6: Function identifier defining nonlinear unloading curve If H5= 7: Function identifier defining unloading curve for moment vs rotation (Integer) |
|
| fct_ID45 | Function identifier
defining
for rotation in
Y. (Integer) |
|
| Negative failure
rotation. Default = -1030 (Real) |
||
| Positive failure
rotation. Default = 1030 (Real) |
||
| F5 | Scale factor for
, rotational for rotation in Y. (Real) |
|
| E5 | Coefficient for strain
rate effect in rotation in Y (homogeneous to a
moment). (Real) |
|
| Ascale5 | Abscissa scale factor for
for rotation in Y (fct_ID15 and fct_ID35). Default = 1 (Real) |
|
| Hscale5 | Coefficient for fct_ID45 for rotation
in Y (homogeneous to a force). Default = 1 (Real) |
|
| K6 | Rotational stiffness (for
linear spring) or unloading stiffness (for elasto-plastic spring)
for rotation in Z. (Real) |
|
| C6 | Rotational damping for
rotation in Z. (Real) |
|
| A6 | Coefficient for strain
rate effect, rotation Z (homogeneous to a moment). Default = 1.0 (Real) |
|
| B6 | Logarithmic coefficient
for strain rate effect, rotation in Z (homogeneous to a
moment). (Real) |
|
| D6 | Scale coefficients for
rotation in Z. Default = 1.0 (Real) |
|
| fct_ID16 | Function identifier
defining f(
), rotation in Z.
If H6 = 4: Function identifier defining upper yield curve (Integer) |
|
| H6 | Rotational hardening flag.
(Integer) |
|
| fct_ID26 | Function identifier
defining
, rotation in
Z. (Integer) |
|
| fct_ID36 | Function used only for
unloading for rotation in Z. If H6 = 4: Function identifier defining lower yield curve, rotational If H6 = 5: Function identifier defining residual rotation vs maximum rotation If H6 = 6: Function identifier defining nonlinear unloading curve If H6= 7: Function identifier defining unloading curve for moment vs rotation (Integer) |
|
| fct_ID46 | Function identifier
defining
for rotation in
Z. (Integer) |
|
| Negative failure
rotation. Default = -1030 (Real) |
||
| Positive failure
rotation. Default = 1030 (Real) |
||
| F6 | Scale factor for
, rotational for rotation in Z. (Real) |
|
| E6 | Coefficient for strain
rate effect rotation in Z (homogeneous to a
moment). (Real) |
|
| Ascale6 | Abscissa scale factor for
for rotation in Z (fct_ID16 and fct_ID36). Default = 1 (Real) |
|
| Hscale6 | Coefficient for fct_ID46 for rotation
in Z (homogeneous to a force). Default = 1 (Real) |
|
| Fsmooth | Smooth strain rate flag.
(Integer) |
|
| Fcut | Strain rate cutting
frequency. Default = 1030 (Real) |
Comments
- The
spring has six DOF computed in a skew system frame:
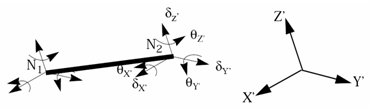
Figure 1.- The six DOF are independent. If initial length is not equal to zero, the equilibrium is insured for forces, but not for moments. It is then recommended to use spring elements TYPE8 with a zero length or with one of the two nodes fixed in all directions.
- If
is a translational DOF, the force in direction
is computed as:
Linear spring:
for = 1, 2, 3
Nonlinear spring:
for i= 1, 2, 3
- If
is a rotational DOF, the moment is computed
as:
Linear spring:
for = 4, 5, 6
Nonlinear spring:
for = 4, 5, 6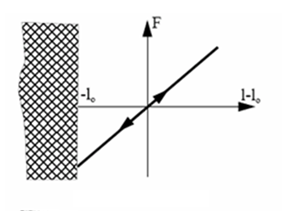
Figure 2. Linear Spring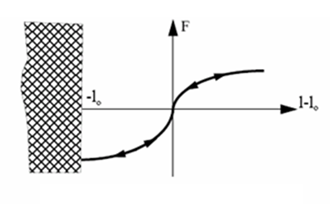
Figure 3. Nonlinear Elastic Spring, Hi=0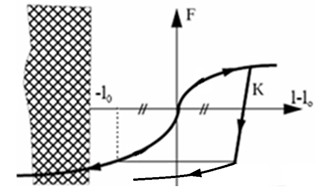
Figure 4. Nonlinear Elastic Plastic Spring, Hi=1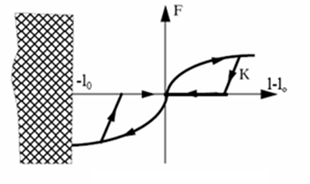
Figure 5. Nonlinear Elasto- plastic Spring with Decoupled Hardening in Tension and Compression, Hi= 2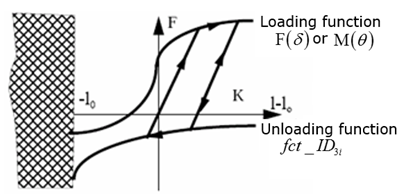
Figure 6. Nonlinear Elastic Plastic Spring "kinematic" Hardening, Hi= 4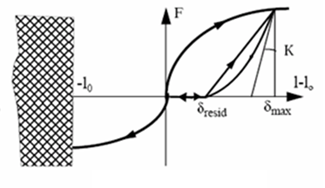
Figure 7. Nonlinear Elastic Plastic Spring "kinematic" Hardening, Hi= 5
Figure 8. Nonlinear Elasto-Plastic Spring with Isotropic Hardening and Nonlinear Unloading, Hi= 6 Figure 9. Nonlinear Spring with Elastic Hysteresis,
Hi=7
Figure 9. Nonlinear Spring with Elastic Hysteresis,
Hi=7With =1, 2, 3, 4, 5, 6
- If Iequil = 0, then:
(1) is moment in by N2
is moment in by N1
- If Iequil = 1,
then:
(2) (3) is moment in by N2
is moment in by N1
is moment in by N2
is moment in by N1
- Failure criterion:
- If the failure criterion is uni-directional, Ifail=0, the spring fails as soon as one of the criteria is met in one direction.
or with and being the failure limits in direction =1,2,3
or with and being the failure limits in direction =4,5,6
- If the failure criteria is multi-directional, Ifail=1, the spring fails if the following criteria is
fulfilled:
(4) with being the failure displacement in direction = 1, 2, 3; and being the falure displacement (rotation) in direction =4,5,6.
- If (resp , with =1, 2, 3) is 0, no failure in the negative direction (resp positive).
- The failure model flag
Ifail2 allows the 3
types of failure criteria:
- If Ifail2= 0, the
displacemenet/rotation criterion is activated:
(5) Where, and are the static failure limit in translational DOF.(6) Where, and are the static failure limit in rotational DOF.
- If Ifail2=1, the
force/moment criterion is activated:
(7) Where, and are the static force failure limit in translational DOF.(8) Where, and are the static moment failure limit in rotational DOF.
In this case, the displacement/rotation values are replaced by failure force/moment values.
- If Ifail2=3, the
energey criterion is activated:
(9) Where, is the static energy failure limit in translational DOF.(10) Where, is the static energy falure limit in rotational DOF.
In this case, the displacement/rotation values are replaced by positive failure energy values.
- If Ifail2= 0, the
displacemenet/rotation criterion is activated:
- If the failure criterion is uni-directional, Ifail=0, the spring fails as soon as one of the criteria is met in one direction.
- For each direction, (with =1, 2, 3) is taken if i is negative, otherwise, is taken if is positive. The (with =1, 2, 3) must be negative. Both (with =4, 5, 6) and are expressed in radians.
- If
Ki (with
=1, 2, 3) is less than the maximum slope of the yield
curve (Ki is not consistent with
the maximum slope of yield curve),
Ki is set to the maximum slope
of the curve.
If Ki (with i=4, 5, 6) is less than the maximum slope of the yield curve (Ki is not consistent with the maximum slope of yield curve), Ki is set to the maximum slope of the curve.
- If hardening flag Hi is 4, the loading curve should be positive for all values of abscissa. The unloading curve in this case should be negative for all values of abscissa. For flag 4, these curves represents upper and lower limits of yield force as function of current spring length variation or strain. The force jumps between the curves each time when the direction of deformation changes.
- If hardening flag
Hi is 5, residual deformation
is a function of maximum displacement:
with =1, 2, 3
with =4, 5, 6
- For linear springs, and (or and ) are null functions and Ai, Bi, and Ei, are not taken into account.
- The third node in element definition is not used to determine local coordinate system of the spring. The local coordinate system is determined either by setting a skew or by using global coordinate system, when the skew is not given.
- Spring is in compression in a given direction of local coordinate system, when projection of direction from initial position of node N1 to current position of node N1 to the direction of the local coordinate system is positive. Otherwise, the spring is in tension in corresponding direction of local coordinate system.
- Spring is activated and/or
deactivated by sensor:
- If sens_ID ≠ 0 and Isflag = 0, the spring element is activated by the sens_ID.
- If sens_ID ≠ 0 and Isflag = 1, the spring element is deactivated by the sens_ID.
- If sens_ID
0 and Isflag = 2, then:
- The spring is activated and, or, deactivated by sensor sens_ID (if sensor is ON, spring is ON; if sensor is OFF, spring is OFF)
- The spring reference length ( ) is the distance between node N1 and N2 at the time of sensor activation.
If a sensor is used for activating or deactivating a spring, the reference length of the spring at sensor activation (or deactivation) is equal to the nodal distance at time = 0; except if sensor flag is equal to 2.