Spring TYPE8 is a six degrees of freedom spring: three translations and three
rotations.
Each degree of freedom is independent from the other, and is associated with a specific stiffness
(see Stiffness Formulation for more
details). To compute the critical time step, the minimum over all degrees of freedom is
kept using the following formula:(1)
Where,
Moment of inertia
The related stiffness
The local coordinate system is not associated with the nodes positions, if no local skew is specified (moving or fixed), the global coordinate system is used.
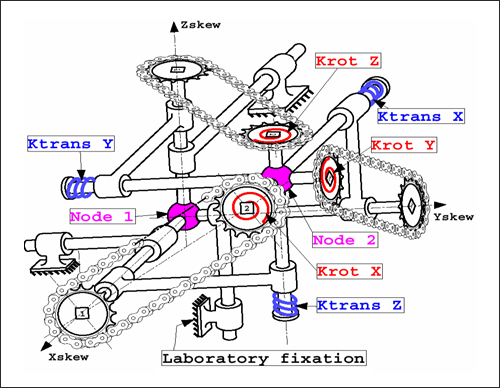
To understand the physical behavior of this mathematical spring, imagine that the two nodes of
the spring are chained together. Therefore, only the relative translation/rotation
between nodes can be considered as independent degrees of freedom. Figure 1 is a schematic
illustration. Figure 1. Spring TYPE8
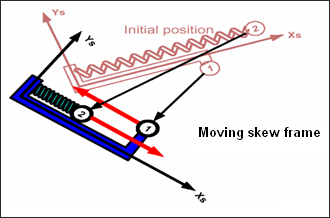
Note: If the local coordinate system is defined through the use of a
moving skew, it is possible to emulate the local X-behavior of a spring TYPE4,
providing the first two nodes defining the moving skew are node 1 and 2 of the
spring (Figure 2).
Figure 2. Deformation in Local X-Direction
It can also be noted that the global force equilibrium is fully respected but not the global
moment equilibrium. Therefore, the spring is connected to the laboratory which applies
the missing moments. It is generally recommended to use spring TYPE8, only if one node
is fixed in all directions or if two nodes are coincident (if the two nodes are
coincident, the translational stiffness' has to be large enough to ensure that the nodes
remain near coincident during the simulation). Doing so, the global moment equilibrium
is respected.
Note: An increase in energy may be observed if a non-zero
length spring TYPE8 undergoes rigid body motion. The spring TYPE8 when their lengths
are not zero.
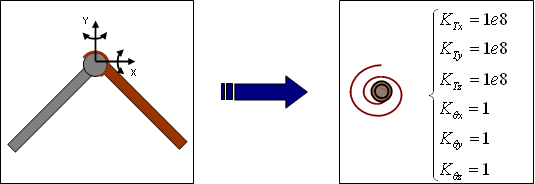
Spring TYPE8 is generally used to model connection between two parts. For example, pivot points
in the steering system are modeled with spring TYPE8. To properly model this type of
connection, translational degrees of freedom must be blocked through the use of rather
high stiffness' and all rotational degrees of freedom must be set free. Below is an
example of such a connection, note that the stiffness values are arbitrary and that they
should be adjusted according to a relevant unit system.
Note: It is possible
to limit the movement by using a nonlinear stiffness in rotation with a sudden
increase (see Stiffness Formulation for
mode details).