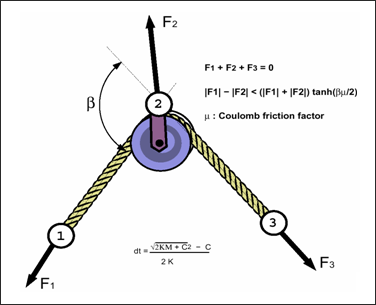
Spring TYPE12 is used to model a pulley. When used in a seat belt model, it is
defined with three nodes.
Node 2 is located at the pulley, and a deformable rope is joining the three nodes (Figure 1 ). The spring
mass is distributed on the three nodes with ¼ at node 1 and node 3 and ½ at node 2.
A Coulomb friction can be applied at node 2, taking into account the angle between the two
strands. Without friction, forces are computed as:
(1)
|
F 1
| = |
F 2
| = K δ
MathType@MTEF@5@5@+=
feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbbG8FasPYRqj0=yi0dXdbba9pGe9xq=JbbG8A8frFve9
Fve9Ff0dmeaabaqaciGacaGaaeqabaWaaeaaeaaakeaadaabdaqaai
aahAeadaWgaaWcbaGaaGymaaqabaaakiaawEa7caGLiWoacqGH9aqp
daabdaqaaiaahAeadaWgaaWcbaGaaGOmaaqabaaakiaawEa7caGLiW
oacqGH9aqpcaWGlbGaeqiTdqgaaa@44A4@
With,
δ
Total rope elongation
K
MathType@MTEF@5@5@+=
feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbbG8FasPYRqj0=yi0dXdbba9pGe9xq=JbbG8A8frFve9
Fve9Ff0dmeaabaqaciGacaGaaeqabaWaaeaaeaaakeaacaWGlbaaaa@372E@
Stiffness
If the Coulomb friction is used, forces are computed as:
(2)
F
f
r
=
min
{
|
Δ
F
|
,
max
[
0
,
(
|
F
1
|
+
|
F
2
|
)
⋅
tanh
(
β
⋅
μ
2
)
]
}
⋅
s
i
g
(
Δ
F
)
MathType@MTEF@5@5@+=
feaagKart1ev2aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbbG8FasPYRqj0=yi0dXdbba9pGe9xq=JbbG8A8frFve9
Fve9Ff0dmeaabaqaciGacaGaaeqabaWaaeaaeaaakeaaqaaaaaaaaa
WdbiaahAeadaWgaaWcbaGaamOzaiaadkhaaeqaaOGaeyypa0JaciyB
aiaacMgacaGGUbWaaiWaaeaadaabdaqaaiaabs5acaWHgbaacaGLhW
UaayjcSdGaaiilaiGac2gacaGGHbGaaiiEamaadmaabaGaaGimaiaa
cYcadaqadaqaamaaemaabaGaaCOramaaBaaaleaacaaIXaaabeaaaO
Gaay5bSlaawIa7aiabgUcaRmaaemaabaGaaCOramaaBaaaleaacaaI
YaaabeaaaOGaay5bSlaawIa7aaGaayjkaiaawMcaaiabgwSixlGacs
hacaGGHbGaaiOBaiaacIgadaqadaqaamaalaaabaGaeqOSdiMaeyyX
ICTaeqiVd0gabaGaaGOmaaaaaiaawIcacaGLPaaaaiaawUfacaGLDb
aaaiaawUhacaGL9baacqGHflY1caWGZbGaamyAaiaadEgadaqadaqa
aiaabs5acaWHgbaacaGLOaGaayzkaaaaaa@6E15@
Where,
μ =
f
f r
(
Δ F
X s c a l e _ F
) ⋅ Y s c a l e _ F
MathType@MTEF@5@5@+=
feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaeqiVd0Maey
ypa0JaciOzamaaBaaaleaacaWGMbGaamOCaaqabaGcdaqadaqaamaa
laaabaGaaeiLdiaadAeaaeaacaWGybGaam4CaiaadogacaWGHbGaam
iBaiaadwgacaGGFbGaamOraaaaaiaawIcacaGLPaaacqGHflY1caWG
zbGaam4CaiaadogacaWGHbGaamiBaiaadwgacaGGFbGaamOraaaa@4FD7@
β
Angle (radians unit)
f
f r
MathType@MTEF@5@5@+=
feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaciOzamaaBa
aaleaacaWGMbGaamOCaaqabaaaaa@38F0@
Function of fct_ID fr
I fr (3)
Δ F = |
F 1
−
F 2
|
MathType@MTEF@5@5@+=
feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbbG8FasPYRqj0=yi0dXdbba9pGe9xq=JbbG8A8frFve9
Fve9Ff0dmeaabaqaciGacaGaaeqabaWaaeaaeaaakeaacqqHuoarca
WHgbGaeyypa0ZaaqWaaeaacaWHgbWaaSbaaSqaaiaaigdaaeqaaOGa
eyOeI0IaaCOramaaBaaaleaacaaIYaaabeaaaOGaay5bSlaawIa7aa
aa@4129@
I fr (4)
Δ F =
F 1
−
F 2
MathType@MTEF@5@5@+=
feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbbG8FasPYRqj0=yi0dXdbba9pGe9xq=JbbG8A8frFve9
Fve9Ff0dmeaabaqaciGacaGaaeqabaWaaeaaeaaakeaacqqHuoarca
WHgbGaeyypa0JaaCOramaaBaaaleaacaaIXaaabeaakiabgkHiTiaa
hAeadaWgaaWcbaGaaGOmaaqabaaaaa@3DFD@
δ
1
MathType@MTEF@5@5@+=
feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbbG8FasPYRqj0=yi0dXdbba9pGe9xq=JbbG8A8frFve9
Fve9Ff0dmeaabaqaciGacaGaaeqabaWaaeaaeaaakeaacqaH0oazda
WgaaWcbaGaaGymaaqabaaaaa@38EA@
is the elongation of strand 1-2 and
δ
2
MathType@MTEF@5@5@+=
feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbbG8FasPYRqj0=yi0dXdbba9pGe9xq=JbbG8A8frFve9
Fve9Ff0dmeaabaqaciGacaGaaeqabaWaaeaaeaaakeaacqaH0oazda
WgaaWcbaGaaGymaaqabaaaaa@38EA@
of strand 2-3.
Figure 1. Spring TYPE12, Pulley
Time step is computed with the same equation that for spring TYPE4, but the stiffness is replaced
with twice the stiffness to ensure stability with high friction coefficients.
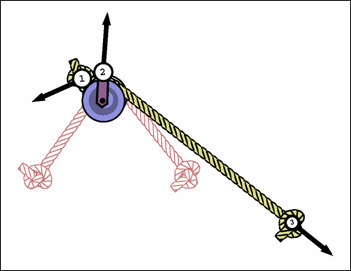
Note: The two strands have to be long enough to avoid node 1, or node 3 slides
up to node 2. Nodes 1 and 3 will be stopped at node 2, if there is a knot at nodes 1
and 3.
Figure 2. Spring TYPE12, Locking
For further information, refer to the Radioss Theory
Manual