/PROP/TYPE12 (SPR_PUL)
Block Format Keyword The pulley spring property set (with one translational DOF) is used to model a pulley.
Format
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| /PROP/TYPE12/prop_ID/unit_ID or /PROP/SPR_PUL/prop_ID/unit_ID | |||||||||
| prop_title | |||||||||
| Mass | sens_ID | Isflag | Ileng | Fric | |||||
| K1 | C1 | A1 | B1 | D1 | |||||
| fct_ID11 | H1 | fct_ID21 | fct_ID31 | fct_ID41 | |||||
| F1 | E1 | Ascale1 | Hscale1 | ||||||
| fct_IDfr | Ifr | Yscale_F | Xscale_F | F_min | F_max | ||||
Definitions
| Field | Contents | SI Unit Example |
|---|---|---|
| prop_ID | Property identifier (Integer, maximum 10 digits) |
|
| unit_ID | Unit Identifier (Integer, maximum 10 digits) |
|
| prop_title | Property title (Character, maximum 100 characters) |
|
| Mass | Mass.
(Real) |
or |
| sens_ID | Sensor
identifier. (Integer) |
|
| Isflag | Sensor flag. 4
5
(Integer) |
|
| Ileng | Input per unit length flag.
(Integer) |
|
| Fric | Coulomb friction. 6 (Real) |
|
| K1 | Stiffness
with Ileng= 0.
(Real) |
|
Stiffness
with Ileng= 1.
(Real) |
||
| C1 | Damping
with Ileng= 0. (Real) |
|
| Damping
with Ileng= 1. (Real) |
||
| A1 | Coefficient for strain rate effect in
tension (homogeneous to a force). Default = 1.0 (Real) |
|
| B1 | Logarithmic coefficient for strain rate
effect in tension (homogeneous to a force). (Real) |
|
| D1 | Scale coefficients for elongation
velocity. Default = 1.0 (Real) |
|
| fct_ID11 | Stiffness function identifier defining
with Ileng= 0 or
with Ileng= 1.
(Integer) |
|
| H1 | Hardening flag for nonlinear spring.
(Integer) |
|
| fct_ID21 | Function defining the change in force
with spring displacement (or rotation) rate in
with Ileng= 0 or
with Ileng=1. (Integer) |
|
| fct_ID31 | Function used only for unloading. If H1=4: Function identifier defining lower yield curve. If H1=5: Function identifier defining residual displacement vs maximum displacement. If H1=6: Function identifier defining nonlinear unloading curve. If H1=7: Function identifier defining nonlinear unloading curve. (Integer) |
|
| fct_ID41 | Function to consider velocity or
deformation velocity dependency damping in
with Ileng= 0 or
with Ileng=1. (Integer) |
|
| Negative failure displacement (if Ileng=0), or Negative failure displacement multiply if Ileng=1). Default = -1030 (Real) |
||
| Positive failure displacement (if Ileng=0), or Positive failure displacement multiply if Ileng=1). Default = 1030 (Real) |
||
| F1 | Scale factor for
or
(abscissa of fct_ID21 function
for
or
). (Real) |
|
| E1 | Scale factor for
or
(fct_ID21 function) which is coefficient for strain
rate effect (homogeneous to a force). (Real) |
|
| Ascale1 | Scale factor for
or
(abscissa of fct_ID11 function
for
or
). (Real) |
|
| Hscale1 | Scale factor for
or
(fct_ID41 function) homogeneous to a
force. Default = 1.0 (Real) |
|
| fct_IDfr | Function identifier defining scaling of
friction coefficient Fric as function of force difference
between left and right arms of the pulley. (Integer) |
|
| Ifr | Friction model flag. 6
(Integer) |
|
| Yscale_F | Ordinate scale for function
fct_IDfr. Default = 1.0 (Real) |
|
| Xscale_F | Abscissa scale for function
fct_IDfr. Default = 0.0 (Real) |
|
| F_min | Negative limit force for non-reversible
friction model. Used only for Ifr = 1. 6 Default = -1030 (Real) |
|
| F_max | Positive limit force for non-reversible
friction model. Used only for Ifr = 1. 6 Default = 1030 (Real) |
Example
/UNIT/2
unit for prop
Mg mm s
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
/PROP/SPR_PUL/1/2
pulley spring example with friction
# Mass sensor_ID Isflag Ileng Fric
2.7e-5 0 0 0 1
# K C A B D
10000 .001 0 0 0
#funct_ID1 H funct_ID2 funct_ID3 funct_ID4 delta_min delta_max
1 0 0 0 0 0 0
# Fscale1 E Ascalex H4
0 0 0 0
# Fct_IDfr Ifr Yscale_F Xscale_F F_MIN F_MAX
2 1 0 0 -800 4500
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
/FUNCT/1
non-linear elastic
# Disp. Force
# X Y
-1 -0.1
0 0
1 10000
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
/FUNCT/2
friction function
# Force Fric
# X Y
-1000 0.2
1000 0.2
2000 0.3
4000 0.9
5000 1.0
10000 1.0
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
#ENDDATAComments
- This property is modeled using
a 3 node /SPRING element where node 1 and node 3 are the ends of the
rope and node 2 is the pully location.
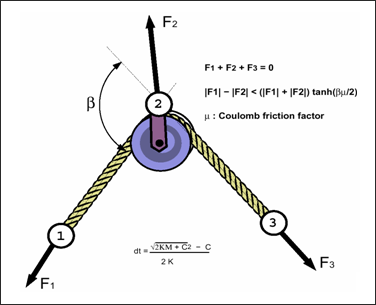
Figure 1.Once node 1 slides to node 2 locking occurs as if there is a knot at node 1 that cannot move through the pully.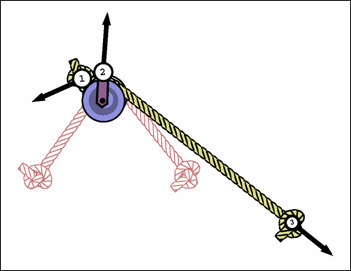
Figure 2. - Force computation:
- In case of Ileng =0 (flag Ileng is defined in Line 3), the force
in the spring is computed as:
(1) With
Where, is the difference between the current length and the initial length of the spring element.
- If Ileng=1, all input are per unit length.
Spring mass =
Spring stiffness =
Spring damping =
Spring inertia =
Where, is the spring reference length.
- The value of force in the spring is computed as:
(2) Where, is the engineering strain:(3) Force functions are given versus engineering strain and engineering strain rate.
Failure criteria are defined with respect to strain. Input of negative/positive failure limit should be related to initial length
- In case of Ileng =0 (flag Ileng is defined in Line 3), the force
in the spring is computed as:
- If (resp ) is 0, no failure in the direction. The must be negative. For linear springs, and are null functions and A1, B1 and E1 are not taken into account.
- Spring is activated and/or
deactivated by sensor:
- If sens_ID ≠ 0 and Isflag = 0, the spring element is activated by the sens_ID.
- If sens_ID ≠ 0 and Isflag = 1, the spring element is deactivated by the sens_ID.
- If sens_ID
0 and Isflag = 2, then:
- The spring is activated and/or, deactivated by sens_ID. (if sensor is ON, spring is ON; if sensor is OFF, spring is OFF).
- The spring reference length ( ) is the distance between spring node N1 and N2 at the time of the sensor's activation.
- If a sensor is used for activating or deactivating a spring, the reference length of the spring at sensor activation (or deactivation) is equal to the nodal distance at time =0; except if sensor flag is equal to 2.
- Friction models definition:
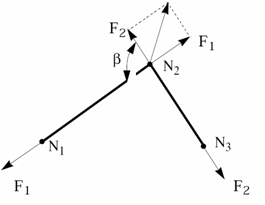
Figure 3.- If fct_IDfr and Fric = 0 (no friction), then .
- If fct_IDfr = 0 and Fric > 0, then constant Coulomb friction coefficient used:
- If fct_IDfr > 0, then variable
friction is calculated as a function on relative force between two pulley
branches:
Ifr = 0 (symmetrical behavior),
Ifr = 1 (non-symmetrical behavior),
Friction force is computed as:(4) Where,(5) - Angle (radians unit)
- Function of fct_IDfr
- If Ifr = 1 (non-symmetrical
behavior) and when F_min (or F_max) is reached,
friction is switching permanently from the function definition to the constant value
Fric.
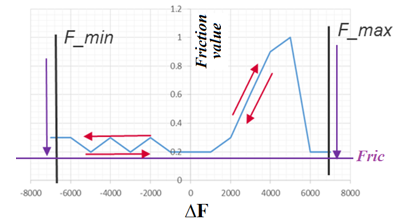
Figure 4.Otherwise, the friction value is defined according to the input function fct_IDfr.