/PROP/TYPE25 (SPR_AXI)
ブロックフォーマットキーワード このプロパティセットは、軸対称スプリングプロパティセットの定義に使用されます。
内容
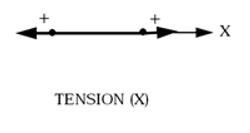 図 1. 引張 / 圧縮 |
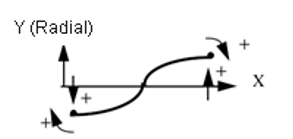 図 2. せん断(半径) |
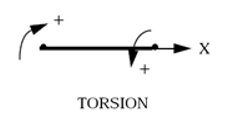 図 3. ねじり |
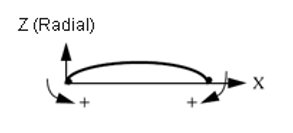 図 4. 曲げ(半径) |
フォーマット
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| /PROP/TYPE25/prop_ID/unit_IDまたは/PROP/SPR_AXI/prop_ID/unit_ID | |||||||||
| prop_title | |||||||||
| Mass | Inertia | Skew_ID | sens_ID | Isflag | Ifail | Ileng | Ifail2 | ||
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| K1 | C1 | A1 | B1 | D1 | |||||
| fct_ID11 | H1 | fct_ID21 | fct_ID31 | F1 | |||||
| Ascale1 | E1 | fct_ID41 | Hscale1 | ||||||
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| K2 | C2 | A2 | B2 | D2 | |||||
| fct_ID12 | H2 | fct_ID22 | fct_ID32 | F2 | |||||
| Ascale2 | E2 | fct_ID42 | Hscale2 | ||||||
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| K3 | C3 | A3 | B3 | D3 | |||||
| fct_ID13 | H3 | fct_ID23 | fct_ID33 | F3 | |||||
| Ascale3 | E3 | fct_ID43 | Hscale3 | ||||||
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| K4 | C4 | A4 | B4 | D4 | |||||
| fct_ID14 | H4 | fct_ID24 | fct_ID34 | F4 | |||||
| Ascale4 | E4 | fct_ID44 | Hscale4 | ||||||
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| C1 | n1 | ||||||||
| C2 | n2 | ||||||||
| C3 | n3 | ||||||||
| C4 | n4 | ||||||||
定義
| フィールド | 内容 | SI 単位の例 |
|---|---|---|
| prop_ID | プロパティの識別子 (整数、最大10桁) |
|
| unit_ID | 単位識別子 (整数、最大10桁) |
|
| prop_title | プロパティのタイトル (文字、最大100文字) |
|
| Mass | スプリングの質量 (実数) |
|
| Inertia | スプリングの慣性 (実数) |
|
| Skew_ID | スキュー座標系識別子 (整数) |
|
| sens_ID | センサーの識別子 (整数) |
|
| Isflag | センサーフラグ
(整数) |
|
| Ifail | 破壊基準
(整数) |
|
| Ileng | 単位長さあたりの入力フラグ
(整数) |
|
| Ifail2 | 破壊モデルフラグ
(整数) |
|
| K1 | 引張に対する剛性 (実数) |
|
| C1 | 引張に対する減衰 (実数) |
|
| A1 | 引張に対するひずみ速度の係数(力に対して均一) デフォルト = 1.0(実数) |
|
| B1 | 引張に対するひずみ速度の対数係数(力に対して均一) (実数) |
|
| D1 | 伸び速度のスケール係数 デフォルト = 1.0(実数) |
|
| fct_ID11 |
を定義する関数識別子
H1 =4の場合: 上方の降伏曲線関数の識別子 (整数) |
|
| H1 | 硬化フラグ
(整数) |
|
| fct_ID21 |
を定義する関数識別子 (整数) |
|
| fct_ID31 | 除荷専用の関数 H1=4の場合: 下方の降伏曲線を定義する関数識別子。 H1=5の場合: 残差変位対最大変位を定義する関数識別子。 H1=6の場合: 非線形除荷曲線を定義する関数識別子。 H1=7の場合: 非線形除荷曲線を定義する関数識別子。 (整数) |
|
| fct_ID41 |
を定義する関数識別子 (整数) |
|
| Hscale1 |
の係数(力に対して均一) デフォルト = 1(実数) |
|
| F1 | 関数
の
に対するスケールファクター (実数) |
|
| 負の破壊限界 デフォルト = -1030(実数) |
||
| 正の破壊限界 デフォルト = 1030(実数) |
||
| Ascale1 |
に対する横軸のスケールファクター(fct_ID11およびfct_ID31) (実数) |
|
| E1 | 引張りに対するひずみ速度の係数(力に対して均一) (実数) |
|
| K3 | ねじりに対する剛性 (実数) |
|
| C3 | ねじりに対する減衰 (実数) |
|
| A3 | ねじりに対するひずみ速度の係数(モーメントに対して均一) デフォルト = 1.0(実数) |
|
| B3 | ねじりに対するひずみ速度の対数係数(モーメントに対して均一) (実数) |
|
| D3 | せん断速度のスケール係数 デフォルト = 1.0(実数) |
|
| fct_ID13 |
を定義する関数識別子
H3=4の場合: 上方の降伏曲線を定義する関数識別子 (整数) |
|
| H3 | 硬化フラグ
(整数) |
|
| fct_ID23 |
を定義する関数識別子 (整数) |
|
| fct_ID33 | 除荷専用の関数 H3=4の場合: 下方の降伏曲線を定義する関数識別子。 H3=5の場合: 残差変位対最大変位を定義する関数識別子。 H3=6の場合: 非線形除荷曲線を定義する関数識別子。 H3=7の場合: 非線形除荷曲線を定義する関数識別子。 (整数) |
|
| fct_ID43 |
を定義する関数識別子 (整数) |
|
| Hscale3 |
の係数(力に対して均一) デフォルト = 1(実数) |
|
| F3 | 関数
の
に対するスケールファクター (実数) |
|
| 負の破壊限界 デフォルト = -1030(実数) |
||
| 正の破壊限界 デフォルト = 1030(実数) |
||
| Ascale3 |
に対する横軸のスケールファクター(fct_ID13およびfct_ID33) (実数) |
|
| E3 | ねじりに対するひずみ速度の係数(モーメントに対して均一) (実数) |
|
| K2 | せん断に対する剛性 (実数) |
|
| C2 | せん断に対する減衰 (実数) |
|
| A2 | せん断に対するひずみ速度の係数(力に対して均一) デフォルト = 1.0(実数) |
|
| B2 | せん断に対するひずみ速度の対数係数(力に対して均一) デフォルト = 1.0(実数) |
|
| D2 | せん断速度のスケール係数 デフォルト = 1.0(実数) |
|
| fct_ID12 |
を定義する関数識別子
H2=4の場合: 上方の降伏曲線を定義する関数識別子 (整数) |
|
| H2 | 硬化フラグ
(整数) |
|
| fct_ID22 |
を定義する関数識別子 (整数) |
|
| fct_ID32 | 除荷専用の関数
H2=4の場合: 下方の降伏曲線を定義する関数識別子。 H2=5の場合: 残差変位対最大変位を定義する関数識別子。 H2=6の場合: 非線形除荷曲線を定義する関数識別子。 H2=7の場合: 非線形除荷曲線を定義する関数識別子。 (整数) |
|
| fct_ID42 |
を定義する関数識別子 (整数) |
|
| Hscale2 |
の係数(力に対して均一) デフォルト = 1(実数) |
|
| F2 | 関数
の
に対するスケールファクター (実数) |
|
| 負の破壊限界 デフォルト = -1030(実数) |
||
| 正の破壊限界 デフォルト = 1030(実数) |
||
| E2 | せん断に対するひずみ速度の係数(力に対して均一) (実数) |
|
| Ascale2 |
に対する横軸のスケールファクター(fct_ID12およびfct_ID32) (実数) |
|
| K4 | 曲げに対する剛性 (実数) |
|
| C4 | 曲げに対する減衰 (実数) |
|
| A4 | 曲げに対するひずみ速度の係数(モーメントに対して均一) デフォルト = 1.0(実数) |
|
| B4 | 曲げに対するひずみ速度の対数係数(モーメントに対して均一) デフォルト = 1.0(実数) |
|
| D4 | 曲げ速度のスケール係数 デフォルト = 1.0(実数) |
|
| fct_ID14 |
を定義する関数識別子
H4=4の場合: 上方の降伏曲線を定義する関数識別子 (整数) |
|
| H4 | 硬化フラグ
(整数) |
|
| fct_ID24 |
を定義する関数識別子 (整数) |
|
| fct_ID34 | 除荷専用の関数 H4=4の場合: 下方の降伏曲線を定義する関数識別子。 H4=5の場合: 残差変位対最大変位を定義する関数識別子。 H4=6の場合: 非線形除荷曲線を定義する関数識別子。 H4=7の場合: 非線形除荷曲線を定義する関数識別子。 (整数) |
|
| fct_ID44 |
を定義する関数識別子 (整数) |
|
| Hscale4 |
の係数(力に対して均一) デフォルト = 1(実数) |
|
| F4 | 関数
の
に対するスケールファクター (実数) |
|
| 負の破壊限界 デフォルト = -1030(実数) |
||
| 正の破壊限界 デフォルト = 1030(実数) |
||
| Ascale4 |
に対する横軸のスケールファクター(fct_ID14およびfct_ID34) (実数) |
|
| E4 | 曲げに対するひずみ速度の係数(力に対して均一) (実数) |
|
| 基準並進速度 デフォルト = 1.0(実数) |
||
| 基準回転速度 デフォルト = 1.0(実数) |
||
| C1 | 並進Xにおける基準速度係数 デフォルト = 0.0(実数) |
|
| n1 | 並進Xにおける基準速度指数 デフォルト = 0.0(実数) |
|
| 並進Xの“多方向”係数 デフォルト = 1.0(実数) |
||
| 並進Xの指数 デフォルト = 2.0(実数) |
||
| C2 | せん断の相対速度係数 デフォルト = 0.0(実数) |
|
| n2 | せん断の相対速度指数 デフォルト = 0.0(実数) |
|
| せん断の”多方向”係数 デフォルト = 1.0(実数) |
||
| せん断の指数 デフォルト = 2.0(実数) |
||
| C3 | ねじれXにおける相対速度係数 デフォルト = 0.0(実数) |
|
| n3 | ねじれXにおける相対速度指数 デフォルト = 0.0(実数) |
|
| ねじれXの“多方向”係数 デフォルト = 1.0(実数) |
||
| ねじれXの指数 デフォルト = 2.0(実数) |
||
| C4 | 曲げの相対速度係数 デフォルト = 0.0(実数) |
|
| n4 | 曲げの相対速度指数 デフォルト = 0.0(実数) |
|
| 曲げの”多方向”係数 デフォルト = 1.0(実数) |
||
| 曲げの指数 デフォルト = 2.0(実数) |
コメント
- スプリングのX方向は、スプリングの節点N1およびN2を使用して定義します。
- スプリングの節点N3が定義されている場合、スプリングのY方向は、スプリングの節点N1およびN3を使用して定義します。N3、N2、およびN1は線状になるべきではありません。Z方向は次のようになります:
(1) - 要素の入力で節点N3が定義されておらず、プロパティ入力でスキューシステムが定義されている場合、Z方向は次のようになります:
(2) - 節点N3もスキューシステムも入力で定義されていない場合、Z方向は次のようになります:
(3) 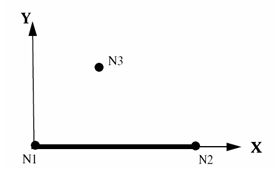
図 5. - 最終的にY方向は次のようになります:
(4)
- スプリングの節点N3が定義されている場合、スプリングのY方向は、スプリングの節点N1およびN3を使用して定義します。N3、N2、およびN1は線状になるべきではありません。Z方向は次のようになります:
- Ileng =0の場合、スプリングの力は次のように計算されます:
線形スプリング:
で、 =1、2
で、 =3、4
非線形スプリング:
で、i=1、2
で、i=3、4
ここで、注:- ここで、 ( )は対応する並進自由度に対するスプリング要素の現在の長さ と初期の長さ との差です。
- は、対応する回転自由度に対するラジアンで表された相対角度です。
- 線形スプリングの場合、 、 と 、 、 は0の関数になり、Ai、Bi、Ei、Hscaleiは考慮されません。
- 剛性関数 (または )が要求された場合、 Kは除荷の勾配としてのみ使用されます。
- Kが関数 (または )の最大勾配よりも低い場合(Kは降伏曲線の最大勾配と一致しません)、Kは降伏曲線の最大勾配に設定されます。
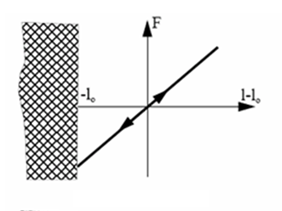
図 6. 線形スプリング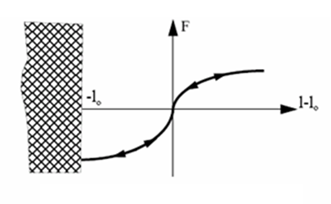
図 7. 非線形弾性スプリング、Hi=0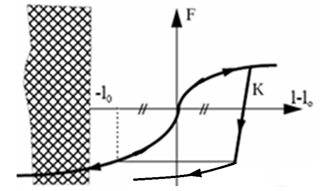
図 8. 非線形弾塑性スプリング、Hi=1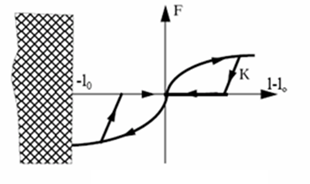
図 9. 引張と圧縮における分離硬化を伴う非線形弾塑性スプリング、Hi=2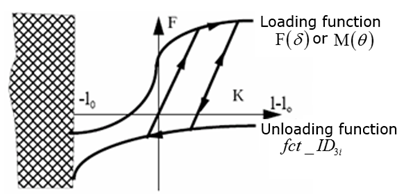
図 10. 非線形弾塑性スプリング“移動”硬化、Hi=4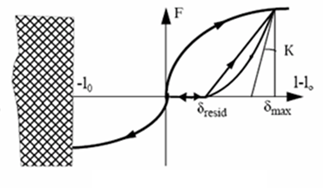
図 11. 非線形除荷を伴う非線形弾塑性スプリング、Hi=5
図 12. 等方硬化と非線形除荷を伴う非線形弾塑性スプリング、Hi=6
図 13. 弾性ヒステリシスを伴う非線形スプリング、Hi=7 - Ileng = 1の場合、すべての入力は単位長さあたりの値になります:
- スプリング質量 =
スプリング剛性 =
スプリングの減衰 =
スプリング慣性 =
ここで、 は、スプリングの基準長さです。
- スプリングの力は次のように計算されます。
線形スプリングの場合:
で、 =1、2
で、 =3、4
非線形スプリング:
で、 =1、2
で、 =3、4
ここで、 は工学ひずみで、次のように定義されます:(5) 工学ひずみと工学ひずみ速度に対して荷重関数を指定します。
破壊基準は、ひずみに対して次のように定義されます。入力する正 / 負の破壊限界は、初期長さに関係付ける必要があります。
- スプリング質量 =
スプリング剛性 =
スプリングの減衰 =
スプリング慣性 =
- 硬化フラグが4の場合、硬化は運動学的です。下降伏曲線と上降伏曲線は同じになります。
- 硬化フラグが5の場合、残差変形は次のように最大変位の関数になります:
ここで、 =1,2
ここで、 =3,4
- 分離硬化モデル(硬化フラグHi=2)および移動硬化モデル(硬化フラグHi=4)は、軸方向(引張およびねじれ)においてのみ有効です。これらは、半径方向(せん断および曲げ)では使用できません。
- 破壊基準:
- 破壊基準が1方向Ifail=0の場合、1つの方向で破壊基準のうちの1つが満たされると、スプリングは即座に破壊します。
または 、ここで と は、方向 =1、2における破壊限界
または 、ここで と は、方向 =3、4における破壊限界
各方向に対して (または )は負にする必要があり、 (または )は正にする必要があります。値がゼロの場合、破壊が考慮されなくなります。
- 破壊基準が多方向でIfail=1の場合、次の基準が満たされるとスプリングは壊れます:
(6) “古い”変位定式化(Ifail =0)では、係数 と i はそれぞれ1.0と2.0に等しくなります。
新しい定式化(Ifail2 > 0)では、次のように並進自由度に対して速度に依存する破壊限界をモデル化することが可能です:(7) ここで、 または は並進方向(5行目および8行目)における静的破壊限界、 は基準速度です。
- 力とエネルギーの基準は、Ifail2=2または3でアクティブになります:
(8) この場合、変位値は正の破壊荷重または破壊エネルギーの値に置き換えられます。
新しい定式化(Ifail2 =1)では、次のように回転自由度に対して速度に依存する破壊限界をモデル化することが可能です:(9) ここで、 または は回転方向(11行目および14行目)における静的破壊限界、 0は基準速度です。
モーメントとエネルギーの基準は、Ifail2=2または3でアクティブになります:(10) この場合、回転値は正の破壊モーメントまたは破壊エネルギーの値に置き換えられます。
- 破壊基準が1方向Ifail=0の場合、1つの方向で破壊基準のうちの1つが満たされると、スプリングは即座に破壊します。
- スプリングはセンサーでアクティブ化かつ / または非アクティブ化されます。
- sens_ID ≠ 0かつIsflag = 0の場合、スプリング要素はsens_IDによってアクティブになります。
- sens_ID ≠ 0かつIsflag = 1の場合、スプリング要素はsens_IDによって非アクティブになります。
- センサーよるアクティブ化または非アクティブ化を伴うスプリング要素は、主にプリテンショナーモデルに使用されます。
- スプリングをアクティブまたは非アクティブにするためにセンサーを使用する場合、センサーによってスプリングがアクティブ(または非アクティブ)になるスプリングの基準長さは時刻0における節点間の距離に等しくなります。