/INTER/TYPE6
Block Format Keyword This interface is used to simulate contact between two rigid bodies with tabulated input of the contact force. It works similar to interface TYPE3. Contact force between the bodies can be input as a function of maximal penetration. The interface also allows you to input a force function for unloading.
Description
- The segments of two contact surface must face each other (example: the surface normals must be oriented from one surface to the other)
- The interface only works with segments connected to solid or shell elements; two contact surface must not share the same node (must be part of 2 different rigid bodies)
- User-defined interface stiffness can reduce the time step
Format
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| /INTER/TYPE6/inter_ID/unit_ID | |||||||||
| inter_title | |||||||||
| surf_ID1 | surf_ID2 | ||||||||
| Sfric | Fric | Gap | Tstart | Tstop | |||||
| IRS | IRm | Inacti | fct_IDff | fct_IDfv | Ascalef | Ascalev | |||
| fct_IDId | Iform | Ascalex | FscaleId | Icor | |||||
| fct_IDul | Stiff | Fscaleul | |||||||
| Visc | fct_IDdv | fct_IDdf | Fscalev | ||||||
Definitions
| Field | Contents | SI Unit Example |
|---|---|---|
| inter_ID | Interface
identifier (Integer, maximum 10 digits) |
|
| unit_ID | Unit identifier (Integer, maximum 10 digits) |
|
| inter_title | Interface
title (Character, maximum 100 characters) |
|
| surf_ID1 | Rigid surface 1
identifier. (Integer) |
|
| surf_ID2 | Rigid surface 2
identifier. (Integer) |
|
| Sfric | Static friction
force. (Real) |
|
| Fric | Coulomb
friction. (Real) |
|
| Gap | Gap for impact
activation. (Real) |
|
| Tstart | Interface activation
time. Default = 0.0 (Real) |
|
| Tstop | Interface deactivation
time. Default = 1.0e30 (Real) |
|
| IRS | Renumbering flag for
segments of the first surface.
(Integer) |
|
| IRm | Renumbering flag for
segments of the second surface (same as IRS).
(Integer) |
|
| Inacti | Deactivation flag of
stiffness in case of initial penetrations.
(Integer) |
|
| fct_IDff | Friction multiplier
function vs. normal force. (Integer) |
|
| fct_IDfv | Friction multiplier
function vs. sliding velocity. (Integer) |
|
| Ascalef | Abscissa scale factor for
velocity functions
(fct_IDff
and
fct_IDdv). (Real) |
|
| Ascalev |
Abscissa scale factor for force functions (fct_IDff and fct_IDdv). (Real) |
|
| fct_IDId | Force vs penetration curve
function identifier. This function should be positive in both force and displacement. (Integer) |
|
| Iform | Contact formulation flag.
1
(Integer) |
|
| Ascalex | Abscissa scale factor on
fct_IDId and
fct_IDul. Default = 1.0 (Real) |
|
| FscaleId | Ordinate scale factor on
fct_IDId. Default = 1.0 (Real) |
|
| Icor | Adjusting force flag, due
to initial intersection. 2
(Integer) |
|
| fct_IDul | Force vs penetration curve
for unload function identifier. This function should be positive in both force and displacement and always less than the loading curve. Not used if Iform = 2. (Integer) |
|
| Stiff | Loading/unloading
stiffness used when transitioning between curves. Required input if Iform = 1, 2. |
|
| Fscaleul | Ordinate scale factor for
unload
fct_IDul. Default = 1.0 (Real) |
|
| Visc | Damping
coefficient. (Real) |
|
| fct_IDdv | Damping force function vs.
penetration velocity. (Integer) |
|
| fct_IDdf | Damping multiplier
function vs. normal force. (Integer) |
|
| Fscalev | Ordinate scale factor on
fct_IDdv. (Real) |
Comments
- The loading curve
fct_IDId should always be
given.
For Iform =0, the unloading curve is not considered and loading and unloading use the same curve fct_IDId.
For Iform =1, the unloading curve fct_IDul is considered and:- When the unloading curve fct_IDul is not defined, then loading follows the fct_IDId and unloading follows a straight curve with slope Stiff down to zero and remain equal to zero. Reloading Radioss jumps from zero to the loading function fct_IDId along a straight curve with slope Stiff.
- When both the loading and unloading curves are defined (the unloading curve should be lower than the loading curve) then during unloading Radioss jumps from loading to unloading curve following a straight curve with slope Stiff. Reloading Radioss jumps from fct_IDul unloading curve to loading curve fct_IDId along a straight curve with slope Stiff.
Some of the cases are shown below: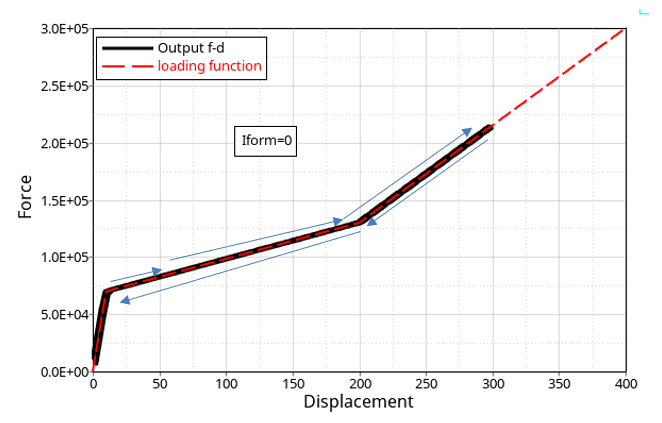
Figure 1. Iform = 0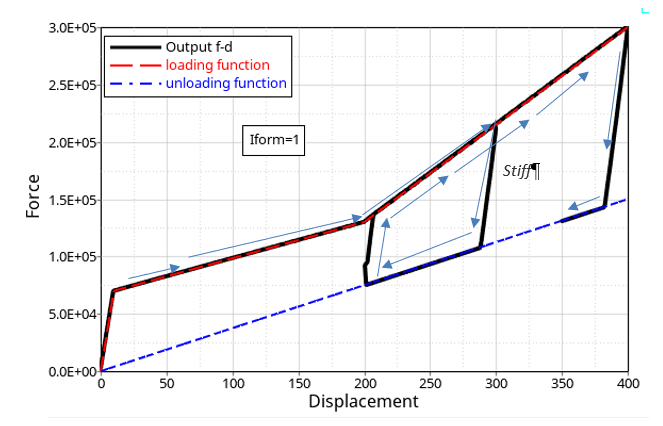
Figure 2. Iform = 1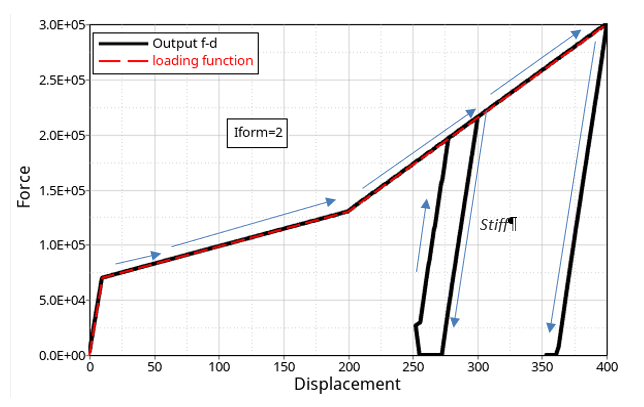
Figure 3. Iform = 2 - If Iform =1 and Icor =1, the interface force at t=0 is set to a value from the unloading function fct_IDul, which corresponds to the initial penetration. If the unloading function is not defined, the initial force is set to zero.
- Tangent friction force,
Ft is calculated
as:
(1) Where,- The normal force
- ( , )
- Dynamic friction coefficient defined as:
(2) Where,- Sliding velocity
- and
- Functions of fct_IDff and fct_IDfv
- Damping force,
Fdamp is calculated
as:
(3) Where,- Penetration velocity
- and
- Functions of fct_IDdf and fct_IDdv