初期荷重、オフセット、スケールの定義
Preload/Offset/Scaleタブには、次の図のようにブッシュのフォース特性が表示されます。
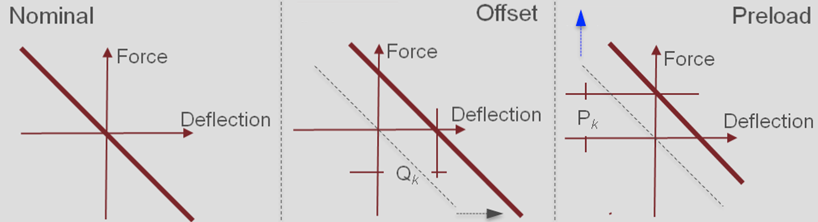
Figure 1.
Figure 1.
次の図は、ブッシュに対する初期荷重とオフセットの効果を示しています。
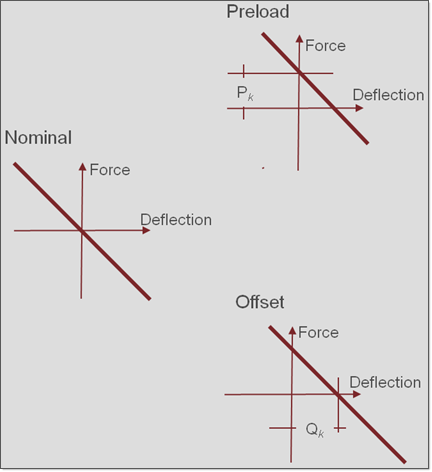
Figure 2.
Figure 2.
ブッシュに対するK番目の方向(x、y、z、ax、ay、azのいずれか)のフォースは次の関数で定義できます。(1)
ここで、
- k番目の方向のフォース
- k番目の方向のフォースの関数
- k番目の方向の変位入力
- k番目の方向の速度入力
- k番目の方向の内部状態(ヒステリシス)で構成した配列
- 時間
変位に対するオフセットQkと変位に対するスケールHkによって変位と速度が変更され、関数Gに対する新たな入力が次のように計算されます。
はスケーリングされたオフセット済み変位です。
はスケーリングされた速度です。
したがって、変更された入力
および
を使用して、次のようにフォースを計算できます。(2)
最後に、フォースとトルクの初期荷重Pkとフォースとトルクに対するスケールVkによって出力が変更され、フォースの計算結果が次の式で得られます。(3)