AutoBush
AutoBushは、地上車両で使用するブッシュを容易にシミュレートできるように設計されたブッシュモデルです。AutoBushエンティティは、TeimOrbit形式で記述されたファイルからブッシュの剛性(フォース対変位)と減衰(フォース対速度)のデータを読み取ります。
- フォース-たわみプロパティはプロパティファイルと呼ばれるASCII形式ファイルに格納されます。
- 複数のブッシュが同じプロパティファイルを参照できます。
- このプロパティファイルの形式には、SIMPACKやADAMSなどの他のMBDコードとの互換性があります。
- ユーザーの選択肢としてブッシュカップリングがサポートされています。
AutoBushでは、ブッシュのフォースとモーメントを計算するサブルーチンと共に、MotionSolveデックでForce_field XMLステートメントが使用されます。ブッシュのプロパティファイルは、シミュレーションの冒頭でMotionSolveによって読み取られます。MotionSolveでは、Akima法を使用して、プロパティファイルに保存されたフォース対変位曲線を内挿します。プロパティファイルに範囲外のたわみがある場合は、MotionSolveによってフォースやモーメントが線形外挿されます。
ブッシュのモデル
インターフェースを使用してAutoBushエンティティを追加すると、ブッシュのグラフィックが表示されます。このモデルには、円筒と2つの大きなX-Y局所座標系フレームインジケーターが含まれます。
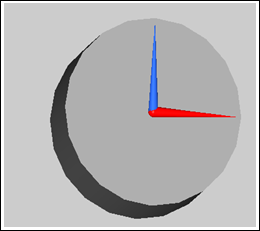
Figure 1. AutoBushブッシュのグラフィック
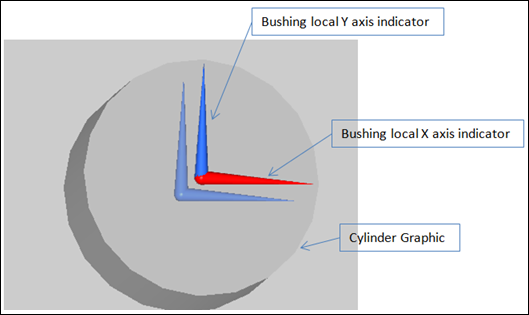
Figure 2. AutoBushブッシュのグラフィック - 透過状態で表示した円筒のグラフィック
カップリング
- 手法
- 説明
- Rectangular
- ブッシュの各軸の変位は互いに独立に計算されます。
- Cylindrical
- XおよびYの変位(並進および回転)をカップリングします。半径方向のたわみ(r)は、次式によって求められます:
r = sqrt( x^2 + y^2 )
Fx = x/r*Gx( sign(x)*r )
Fy = y/r*Gy( sign(y)*r )
- Spherical
- X、YおよびZ方向の変位(並進および回転)をカップリングします。半径方向のたわみ(r)は、次によって求められます:
r = sqrt( x^2 + y^2 + z^2 )
Fx = x/r*Gx( sign(x)*r )
Fy = y/z*Gy( sign(y)*r )
Fz = z/r*Gz( sign(z)*r )
AutoBushの結合
結合は、結合している2つのボディ、フォースが作用するポイント、およびブッシュの向きを定義するマーカーを定義します。ボディ、マーカー、およびポイントはグラフィカルに選択することも、Project Browserを介して選択することもできます。
TeimOrbitブッシュファイル
- HEADER
- ヘッダーブロックは、プリプロセッサーから書き込まれるファイルの形式を記述します。
- UNITS
- 単位ブロックは、ファイルに記録されたデータについて説明します。
- DAMPING
- ブッシュの減衰。このブッシュモデルでは、下のファイルに示されているように、線形減衰がサポートされています。
- FX_CURVE、FYCURVEなど
- ブロックヘッダーで特定された、自由度のフォース対変位のデータ。データは昇順で記録されます。
$-------------------------------------------------------------------HEADER
[HEADER]
FILE_TYPE = 'bus'
FILE_VERSION = 4.0
FILE_FORMAT = 'ASCII'
$------------------------------------------------------------------UNITS
[UNITS]
LENGTH = 'mm'
ANGLE = 'degrees'
FORCE = 'newton'
MASS = 'kg'
TIME = 'second'
$-----------------------------------------------------------------DAMPING
[DAMPING]
FX_DAMPING = 0.5
FY_DAMPING = 0.5
FZ_DAMPING = 0.5
TX_DAMPING = 0.5
TY_DAMPING = 0.5
TZ_DAMPING = 0.5
$----------------------------------------------------------------FX_CURVE
[FX_CURVE]
{ x fx}
-10.0 -45000.0
-8.0 -36000.0
-6.0 -27000.0
-4.0 -18000.0
-2.0 -9000.0
0.0 0.0
2.0 9000.0
4.0 18000.0
6.0 27000.0
8.0 36000.0
10.0 45000.0
$----------------------------------------------------------------FY_CURVE
[FY_CURVE]
{ y fy}
-10.0 -45000.0
-8.0 -36000.0
-6.0 -27000.0
-4.0 -18000.0
-2.0 -9000.0
0.0 0.0
2.0 9000.0
4.0 18000.0
6.0 27000.0
8.0 36000.0
10.0 45000.0
$----------------------------------------------------------------FZ_CURVE
[FZ_CURVE]
{ z fz}
-10.0 -45000.0
-8.0 -36000.0
-6.0 -27000.0
-4.0 -18000.0
-2.0 -9000.0
0.0 0.0
2.0 9000.0
4.0 18000.0
6.0 27000.0
8.0 36000.0
10.0 45000.0
$----------------------------------------------------------------TX_CURVE
[TX_CURVE]
{ ax tx}
-45.0 -2025000.0
-36.0 -1620000.0
-27.0 -1215000.0
-18.0 -810000.0
-9.0 -405000.0
0.0 0.0
9.0 405000.0
18.0 810000.0
27.0 1215000.0
36.0 1620000.0
45.0 2025000.0
$----------------------------------------------------------------TY_CURVE
[TY_CURVE]
{ ay ty}
-45.0 -2025000.0
-36.0 -1620000.0
-27.0 -1215000.0
-18.0 -810000.0
-9.0 -405000.0
0.0 0.0
9.0 405000.0
18.0 810000.0
27.0 1215000.0
36.0 1620000.0
45.0 2025000.0
$----------------------------------------------------------------TZ_CURVE
[TZ_CURVE]
{ az tz}
-45.0 -2025000.0
-36.0 -1620000.0
-27.0 -1215000.0
-18.0 -810000.0
-9.0 -405000.0
0.0 0.0
9.0 405000.0
18.0 810000.0
27.0 1215000.0
36.0 1620000.0
45.0 2025000.0