Kinematics and Compliance
概要

Figure 1. Kinematics and Complianceイベント
詳細説明
- ライド
- ロール
- 接触パッチ力
- ステアリング解析
- ライド
- イベントはライド解析から始まります。このイベントでは、すべてのホイールがジャッキを経由して垂直変位入力の影響を受けます。入力の振幅は同相の振幅と同じです。イベントのこの部分は10秒間です。
時間(秒単位) 動作 0~2.5 ホイールが設計位置からジャウンス位置に移動します。 2.5~5.0 ホイールがジャウンス位置から設計位置に移動します。 5.0~7.5 ホイールが設計位置からリバウンド位置に移動します。 7.5~10.0 ホイールがリバウンド位置から設計位置に移動します。 10.0 イベントが終了します。 - ロール
- このイベントは、ライドイベントが完了した直後に始まります。イベントのこの部分では、すべてのホイールがジャッキを経由して垂直変位入力の影響を受けます。入力振幅は同じですが、左ホイールと右ホイールの位相が180度ずれています。イベントのこの部分は10秒間です。
時間(秒単位) 動作 10~12.5 左ホイールが設計位置からジャウンス位置に移動します。 右ホイールが設計位置からリバウンド位置に移動します。
12.5~15.0 左ホイールがジャウンス位置から設計位置に移動します。 右ホイールがリバウンド位置から設計位置に移動します。
15.0~17.5 左ホイールが設計位置からリバウンド位置に移動します。 右ホイールが設計位置からジャウンス位置に移動します。
17.5~20.0 左ホイールがリバウンド位置から設計位置に移動します。 右ホイールがジャウンス位置から設計位置に移動します。
20.0 イベントが終了します。 - 接触パッチ力
- このイベントは、ロール解析が完了した直後に始まります。イベントのこのフェーズでは、接触パッチにおけるフォースをシミュレートすることにより、サスペンションのコンプライアンスが評価されます。このイベントの最初の20秒間に、横力が接触パッチに適用されます。横力はコーナリング状態をシミュレートします。次の20秒間に、前後力が接触パッチに適用されます。前後力は制動状態と加速状態をシミュレートします。このイベントの3つ目の部分は、ホイールの垂直軸を中心にトルクを適用することにより、ホイールの垂直軸を中心としたモーメントをシミュレートします。イベントのこの部分は20秒間です。
時間(秒単位) 動作 20~30 横力が4つすべての接触パッチに平行に適用されます。 30~40 横力が反対方向に4つすべての接触パッチに適用されます。 40~50 前後力がグローバル原点のX方向に沿って4つすべての接触パッチに適用され、制動状態がシミュレートされます。 50~60 前後力がグローバル原点の負のX方向に沿って4つすべての接触パッチに適用され、加速状態がシミュレートされます。 60~70 垂直軸(全体座標系Z)を中心にアライニングトルクが4つすべての接触パッチに同じ方向に適用されます。 70~80 垂直軸(全体座標系Z)を中心にアライニングトルクが反対方向に4つすべての接触パッチに適用されます。 80 イベントが終了します。
- ステアリング解析
- Kinematics and Compliance解析のこの最後の部分では、ステアリング入力が適用されたときのフロントサスペンションキネマティックがテストされます。イベントのこの部分は10秒間で、ステアリングモーションが両方向に適用されます。
時間(秒単位) 動作 80~85 ステアリングモーションが反時計回りの方向に適用されます。 85~90 ステアリングモーションが時計回りの方向に適用されます。 90 イベントが終了します。 - イベント内のエンティティは、下の図に示すように、MotionView Projectブラウザに表示されます。
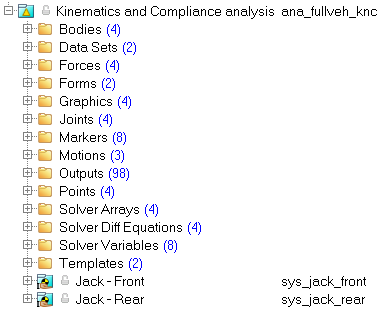
Figure 2. ブラウザのビュー - Forms - Straight Line Acceleration Analysis
入力パラメータ
| 名称 | 説明 |
|---|---|
| Front jounce travel in ride | ライドにおいて前輪が地面に対して上方向に移動する垂直距離入力。 |
| Rear jounce travel in ride | ライドにおいて後輪が地面に対して上方向に移動する垂直距離入力。 |
| Front rebound travel ride | ライドにおいて前輪が地面に対して下方向に移動する垂直距離入力。 |
| Rear rebound travel in ride | ライドにおいて後輪が地面に対して下方向に移動する垂直距離入力。 |
| From wheel travel in roll | 前輪が地面に対して両方向に移動する垂直距離入力。 |
| Rear wheel travel in roll | 後輪が地面に対して両方向に移動する垂直距離入力。 |
| Front wheel lateral force at contact patch | コーナリング中の状態をシミュレートするために前輪接触パッチに適用される横力。 |
| Rear wheel lateral force at contact patch | コーナリング中の状態をシミュレートするために後輪接触パッチに適用される横力。 |
| Front wheel longitudinal force at contact patch | 制動と加速をシミュレートするために前輪接触パッチに車両の長さに沿って適用されるフォース。 |
| Rear wheel longitudinal force at contact patch | 制動と加速をシミュレートするために後輪接触パッチに車両の長さに沿って適用されるフォース。 |
| Front aligning torque | 前輪垂直軸を中心に適用されるトルク。 |
| Rear aligning torque | 後輪垂直軸を中心に適用されるトルク。 |
| Steering Angle | コーナリングをシミュレートするためのハンドルでの回転入力。 |
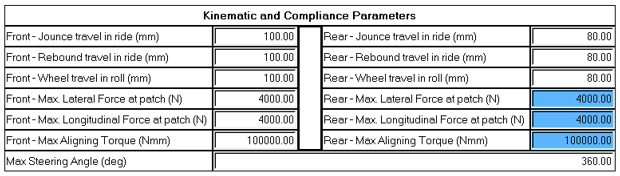
Figure 3. K & Cイベント - 入力フォーム
アタッチメント
| 名前 | 説明 |
|---|---|
| Rack jt | ラック&ピニオン式ステアリングシステム用のラックにある並進ジョイントに結合されます。 |
| Tire force – Front | タイヤシステム内のフロントタイヤ力エンティティに結合されます。 |
| Tire force – Rear | タイヤシステム内のリアタイヤ力エンティティに結合されます。 |
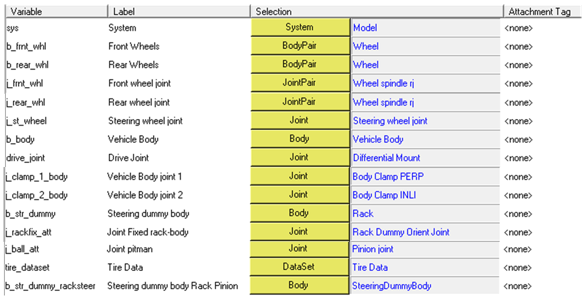
Figure 4. フルビークルイベント - アタッチメント

Figure 5. Kinematics and Complianceイベント - アタッチメント
データセット
フルビークルのKinematics and Compliance解析には2つのデータセットが含まれています。1つは入力としてシミュレーションパラメータを取ります(入力パラメータの下の表を参照)。2つ目のデータセット“Vehicle Parameters”は、入力として車両に関する情報を取り、シミュレーション中に使用されます。
| 名前 | 説明 | 単位 |
|---|---|---|
| Type of suspension front | フロントサスペンションタイプに基づいて設定する必要があるオプション。使用可能なオプションは、independentとdependentです。 | |
| Type of suspension rear | リアサスペンションタイプに基づいて設定する必要があるオプション。使用可能なオプションは、independentとdependentです。 | |
| Tire model | タイヤをシミュレートするために、フォースベースのタイヤモデルの車両を使用するか、単純な垂直スプリングに切り替えるためのオプション。 | |
| Tire static loaded radius - Front | その上に車両重量がかかるフロントタイヤの半径。 | mm |
| Tire static loaded radius - Rear | その上に車両重量がかかるリアタイヤの半径。 | mm |
| Tire vertical spring rate - Front | フロントタイヤのスプリングレート。この値は、特定の出力の計算に使用され、フォースベースのタイヤの使用時にはタイヤプロパティファイル内の値と一致する必要があります。 | N/mm |
| Tire vertical spring rate - Rear | リアタイヤのスプリングレート。この値は、特定の出力の計算に使用され、フォースベースのタイヤの使用時にはタイヤプロパティファイル内の値と一致する必要があります。 | N/mm |
| Rear wheel lateral force at contact patch | コーナリング中の状態をシミュレートするために後輪接触パッチに適用される横力。 | N |
| Vehicle CG Height | 車体CGから地面までの垂直距離。 | mm |
| Wheelbase | フロントとリアのホイール中心間の縦方向の距離。 | mm |
| Front braking ratio | 前輪での制動力配分。1の値は、フロントでの100%の制動を意味します。 | % |
| Front drive ratio | フロントアクスルに配分されるエンジン出力の割合。1の値は、すべての出力がフロントアクスルに送られることを意味します。 | % |
| Axle ratio | 出力ギアの角速度に対する入力ギアの角速度の割合。ギア比または速度比と呼ばれることもあります。 |
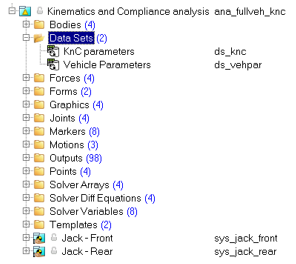
Figure 6. Projectブラウザのビュー - Dataset “Full Vehicle Data”
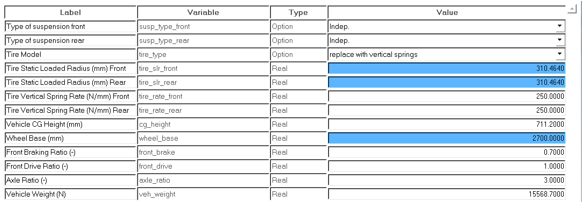
Figure 7. ダイアログビュー - Dataset “Full Vehicle Data”
フォーム
| フォーム | 説明 |
|---|---|
| Kinematics and compliance parameters | このフォームは、ジャウンスおよびリバウンド距離、ステアリング角、接触パッチ力などのシミュレーション条件を定義するために使用します。 |
| Vehicle Parameters | このフォームは、重量、CG高さ、ホイールベース、タイヤ剛性などの車両条件を定義するために使用します。 |
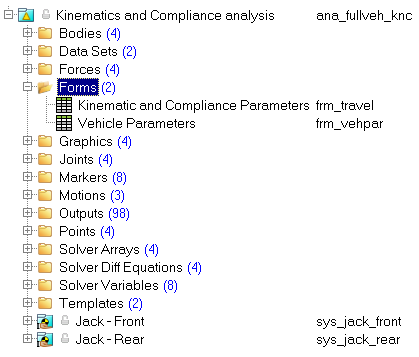
Figure 8. Projectブラウザのビュー - Form “Kinematics and Compliance”
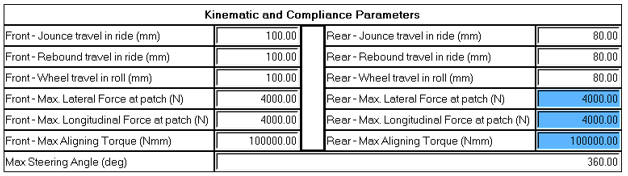
Figure 9. ダイアログビュー - Form “Kinematics and Compliance Parameters”
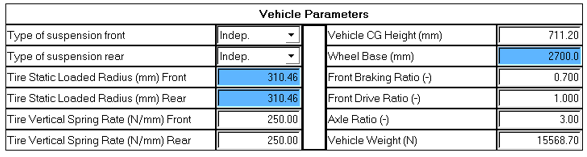
Figure 10. ダイアログビュー - Form “Vehicle Parameters”
グラフィックス
Kinematics and Complianceイベントは、4つのタイヤが4つのジャッキに接触した状態で車両が持ち上げられる4つのジャッキアップを表す4つのグラフィックスエンティティで構成されます。
| 名前 | Type | 説明 |
|---|---|---|
| Jack Box Front | Box | フロントジャッキ用の四角いプラットフォームを表します。 |
| Jack Box Rear | Box | リアジャッキ用の四角いプラットフォームを表します。 |
| Jack cyl front | Cylinder | フロントジャッキ用の円筒形の柱を表します。 |
| Jack cyl rear | Cylinder | リアジャッキ用の円筒形の柱を表します。 |
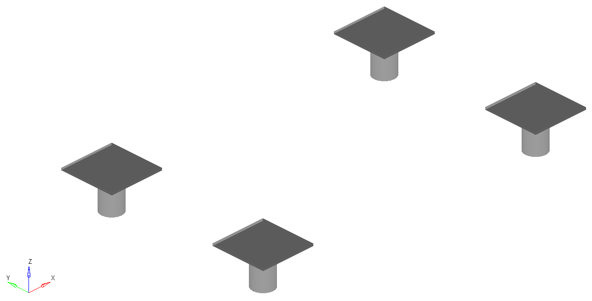
Figure 11. グラフィック表示 - “Kinematics and Compliance”内のGraphics
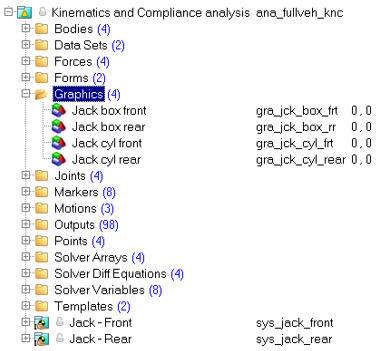
Figure 12. Projectブラウザのビュー - Graphics - Kinematics and Compliance
ジョイント
Kinematics and Complianceイベントは、8つのジョイントで構成されています。そのうちの4つは、Jack FrontとJack Rearのサブシステムに含まれています。
| 名前 | Type | 説明 |
|---|---|---|
| Jack dummy fixed joint Front | Fixed | フロント接触パッチに配置されたダミーボディをナックルボディに結合し、前輪の中心に配置されます。 |
| Jack dummy fixed joint Rear | Fixed | リア接触パッチに配置されたダミーボディをナックルボディに結合し、後輪の中心に配置されます。 |
| Vehicle body fixed to ground | Fixed | 車体をグラウンドボディに結合し、車体CGに配置されます。 |
| Rack dummy ball | Ball | ラックをラック&ピニオン式ハンドル用のステアリングダミーボディアタッチメントに結合します。 |
| Jack trans jt - Front | Translational | フロントジャッキボディをグラウンドボディに結合し、全体座標系のZに揃えられます。 |
| Inplane joint – Front | In plane | 前輪をフロントジャッキボディに結合し、フロント接触パッチに配置されます。 |
| Jack trans jt - Rear | Translational | リアジャッキボディをグラウンドボディに結合し、全体座標系のZに揃えられます。 |
| Inplane joint – Rear | In plane | 後輪をリアジャッキボディに結合し、リア接触パッチに配置されます。 |
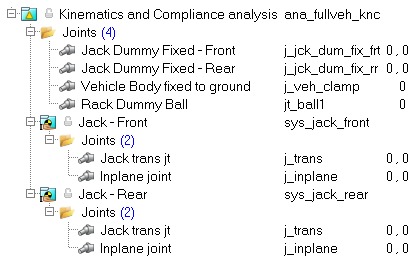
Figure 13. Projectブラウザのビュー - Joints - Kinematics and Compliance
マーカー
| 名前 | 説明 |
|---|---|
| Front wheel center marker | このマーカーは、前輪上で定義され、前輪の中心に配置されます。テスト装置パラメータ配列はこのマーカーを参照します。 |
| Rear wheel center marker | このマーカーは、後輪上で定義され、後輪の中心に配置されます。テスト装置パラメータ配列はこのマーカーを参照します。 |
| WC marker at ground - Front | マーカーは、グラウンドボディ上で定義され、前輪の中心に配置されます。テスト装置パラメータ配列はこのマーカーを参照します。 |
| WC marker at ground - Rear | マーカーは、グラウンドボディ上で定義され、後輪の中心に配置されます。テスト装置パラメータ配列はこのマーカーを参照します。 |
| Kingpin axis - Front | マーカーは、フロントナックル上で定義され、下のボールジョイントに配置されます。テスト装置パラメータ配列はこのマーカーを参照します。 |
| Kingpin axis - Rear | マーカーは、リアナックル上で定義され、標準の下のボールジョイントに配置されます。テスト装置パラメータ配列はこのマーカーを参照します。 |
| Front wheel patch marker | マーカーは、前輪上で定義され、ホイールパッチに配置されます。このマーカーはフロントパッチ力エンティティによって使用されます。 |
| Rear wheel patch marker | マーカーは、後輪上で定義され、ホイールパッチに配置されます。このマーカーはリアパッチ力エンティティによって使用されます。 |
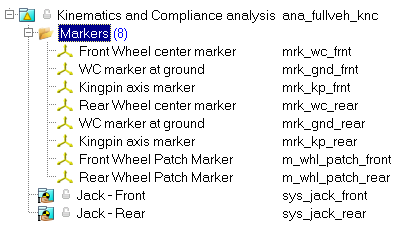
Figure 14. Projectブラウザのビュー - Markers - Kinematics and Compliance
ポイント
| 名前 | 説明 |
|---|---|
| Front tire patch | フロントタイヤの接触パッチの位置を示すポイント。 |
| Rear tire patch | リアタイヤの接触パッチの位置を示すポイント。 |
| Jack bot front | フロントジャッキの下部の位置を示すポイント。このポイントは、ジャッキ並進ジョイントによって参照されます。 |
| Jack bot rear | リアジャッキの下部の位置を示すポイント。このポイントは、ジャッキ並進ジョイントによって参照されます。 |
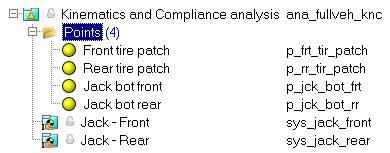
Figure 15. Projectブラウザのビュー - Points - Kinematics and Compliance
ソルバー変数
| 名前 | 説明 |
|---|---|
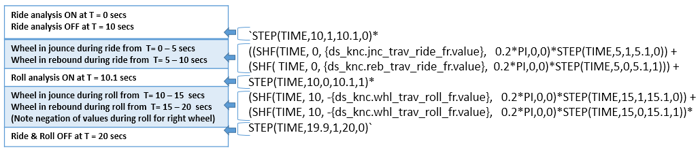
| Left Front command | この変数には、左前輪の解析のライドフェーズとロールフェーズに関する式が含まれています。式については、この表の下で詳しく説明します。 |
| Right Front command | この変数には、右前輪の解析のライドフェーズとロールフェーズに関する式が含まれています。式については、この表の下で詳しく説明します。 |
| Left Rear command | この変数には、左後輪の解析のライドフェーズとロールフェーズに関する式が含まれています。式については、この表の下で詳しく説明します。 |
| Right Rear command | この変数には、右後輪の解析のライドフェーズとロールフェーズに関する式が含まれています。式については、この表の下で詳しく説明します。 |
| Left Front feedback | 全体座標系において、左前輪の中心の元の位置に対する、左前輪の中心マーカーの全体座標系Z変位を計算する式が含まれています。 |
| Right Front feedback | 全体座標系において、右前輪の中心の元の位置に対する、右前輪の中心マーカーの全体座標系Z変位を計算する式が含まれています。 |
| Left Rear feedback | 全体座標系において、左後輪の中心の元の位置に対する、左後輪の中心マーカーの全体座標系Z変位を計算する式が含まれています。 |
| Right Rear feedback | 全体座標系において、右後輪の中心の元の位置に対する、右後輪の中心マーカーの全体座標系Z変位を計算する式が含まれています。 |
- Left Front command式
-

- Right Front command式
-
- Left Rear command変数
-

- Right Rear command変数
-
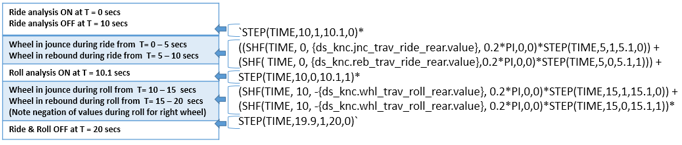
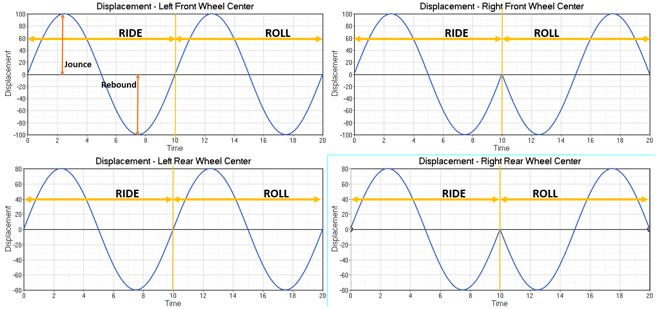
Figure 16. プロット – ソルバー変数式に基づく4つすべてのホイールのホイール変位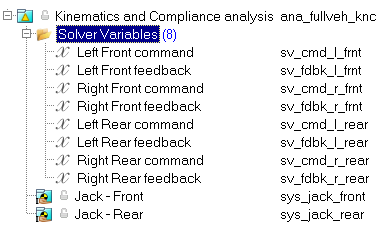
Figure 17. Projectブラウザのビュー - Solver Variables - Kinematics and Compliance
ソルバー微分方程式
| 名前 | 説明 |
|---|---|
| Left Front jack | 左フロントジャッキ作動力で使用される式が含まれています。式自体については、この表の下で詳しく説明します。 |
| Right Front jack | 右フロントジャッキ作動力で使用される式が含まれています。式自体については、この表の下で詳しく説明します。 |
| Left Rear jack | 左リアジャッキ作動力で使用される式が含まれています。式自体については、この表の下で詳しく説明します。 |
| Right Rear jack | 右リアジャッキ作動力で使用される式が含まれています。式自体については、この表の下で詳しく説明します。 |
- Left Front Jack微分方程式の詳細
- 4つのソルバー微分方程式の構造とロジックは、個別のソルバー変数値が使用される点を除いて同様です。“Left front jack diff”を使用した例を以下に示します。
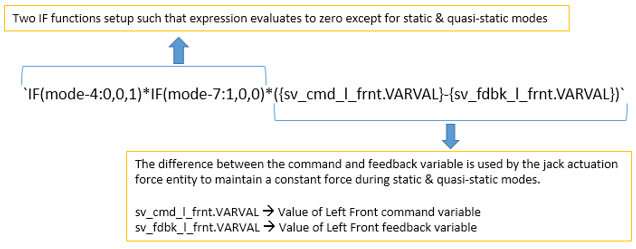
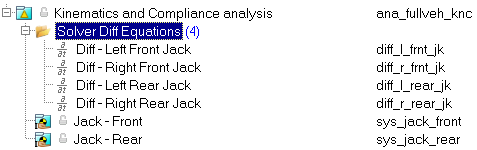
Figure 18. Projectブラウザのビュー - Solver Differentials - Kinematics and Compliance
ソルバー配列
- Vehicle Parameter array
- Vehicle Parameter arrayには、SDFを計算するために使用される車両情報が含まれています。データの一部は、解析でポイントの位置とフォースを作成するためにも使用されます。データはVehicle Parameterフォームに入力されます。Vehicle Parameter arrayには、フロントサスペンション用とリアサスペンション用の2種類があります。
Vehicle Parameter Array要素名 説明 使用法 Ds_vehpar.veh_end.ival 車両エンド: - 1
- フロントサスペンション
- 2
- リアサスペンション
- 3
- 第2リアサスペンション
サスペンションのタイプをSDFサブルーチンに伝達します。サブルーチンは、車両のどのエンドが解析されるかに応じて、特定のパラメータに対して異なる値を計算します。 Ds_vehpar.dif_mnt.ival マウントタイプの区分 - 0
- ボディにマウント
- 1
- ばね下マウント(軸と一体化)
アンチリフトおよびアンチダイブ計算において、SDF計算に使用されます。 Ds_vehpar.tire_slr.value タイヤの静的荷重半径(mm) “Jack GeomU”ポイントを見つけるために、およびSDF計算の多くで使用されます。 Ds_vehpar.tire_rate.value タイヤのスプリングレート(N/mm) SDF計算で使用されます。 Ds_vehpar.cg_height.value 車両重心の高さ。地面からZ方向のCGまでが計測されます(mm)。 SDF計算(特にアンチリフトおよびアンチダイブ計算)に使用されます。 Ds_vehpar.wheel_base.value 車両の軸間距離(mm) SDF計算(特にアンチリフトおよびアンチダイブ計算)に使用されます。 Ds_vehpar.front_brake.value 合計ブレーキトルクに対する前部ブレーキトルクの比率。通常0.6~0.7です。 SDF計算(特にアンチリフトおよびアンチダイブ計算)に使用されます。 Ds_vehpar.front_drive.value 前部軸に適用されるエンジントルクを合計トルクで除算した比率。 SDF計算(特にアンチリフトおよびアンチダイブ計算)に使用されます。 Ds_vehpar.axle_ratio 解析中のサスペンションの公称軸比。通常2.7~5.0の範囲です。 SDF計算(特にアンチリフトおよびアンチダイブ計算)に使用されます。 Ds_vehpar.veh_weight.value 車両総重量(Kg) SDF計算と車両フォース解析イベントでは使用されません。
- Testrig Parameter Array
- Testrig parameter arrayには、ポイント、フォース、およびモーションのデータが含まれ、SDFサブルーチンに渡されて、SDF計算イベントを実行するために使用されます。Testrig parameter arrayは記号的に定義され、編集の必要はありません。Testrig parameter arrayには、フロントサスペンション用とリアサスペンション用の2種類があります。
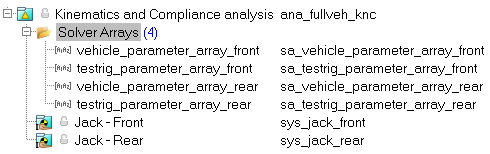
Figure 19. Projectブラウザのビュー - Solver Array - Kinematics and Compliance
フォース
| 名前 | 説明 | |
|---|---|---|
| Front Patch Force | これは、前後力、横力、およびアライニングフォースをシミュレートするための参照として、ホイールパッチマーカー付きの前輪の接触パッチに適用される作用のみのフォースペアです。 各方向のフォースが以下に示す式を使用して定義されます。 |
|
| Fx - 左 |
式には、値がKnC Parameters DataSetで定義された正弦波フォース入力を0.1PIの周波数で60~80秒の間適用する単調和関数が含まれています。 |
|
| Fy - 左 |
式には、値がKnC Parameters DataSetで定義された正弦波フォース入力を0.2PIの周波数で20~40秒の間適用する単調和関数が含まれています。 |
|
| Fz – 左 | 0 | |
| Tx – 左 | 0 | |
| Ty – 左 | 0 | |
| Tz – 左 |
式には、値がKnC Parameters DataSetで定義された正弦波トルク入力を0.2PIの周波数で40~60秒の間適用する単調和関数が含まれています。 |
|
| Fx - 右 |
式には、値がKnC Parameters DataSetで定義された正弦波フォース入力を0.1PIの周波数で60~80秒の間適用する単調和関数が含まれています。 |
|
| Fy - 右 |
式には、値がKnC Parameters DataSetで定義された正弦波フォース入力を0.2PIの周波数で20~40秒の間適用する単調和関数が含まれています。20~30秒の間の最初の10秒間は、フォースが正のY方向になり、次の10秒間は反対方向になります。これは、左ホイールに対して平行の横力と反対の横力をシミュレートするために行われます。 |
|
| Fz – 右 | 0 | |
| Tx – 右 | 0 | |
| Ty – 右 | 0 | |
| Tz – 右 |
式には、値がKnC Parameters DataSetで定義された正弦波トルク入力を0.2PIの周波数で40~60秒の間適用する単調和関数が含まれています。40~50秒の間の最初の10秒間は、トルクが左ホイールと同じ方向になり、次の10秒間は左ホイールと反対方向になります。これは、左ホイールに対して平行のアライニングトルクと反対のアライニングトルクをシミュレートするために行われます。 |
|
| Rear Patch Force | これは、前後力、横力、およびアライニングフォースをシミュレートするための参照として、ホイールパッチマーカー付きの後輪の接触パッチに適用される作用のみのフォースペアです。 各方向のフォースが以下に示す式を使用して定義されます。 |
|
| Fx - 左 |
式には、値がKnC Parameters DataSetで定義された正弦波フォース入力を0.1PIの周波数で60~80秒の間適用する単調和関数が含まれています。 |
|
| Fy - 左 |
式には、値がKnC Parameters DataSetで定義された正弦波フォース入力を0.2PIの周波数で20~40秒の間適用する単調和関数が含まれています。 |
|
| Fz – 左 | 0 | |
| Tx – 左 | 0 | |
| Ty – 左 | 0 | |
| Tz – 左 |
式には、値がKnC Parameters DataSetで定義された正弦波トルク入力を0.2PIの周波数で40~60秒の間適用する単調和関数が含まれています。 |
|
| Fx - 右 |
式には、値がKnC Parameters DataSetで定義された正弦波フォース入力を0.1PIの周波数で60~80秒の間適用する単調和関数が含まれています。 |
|
| Fy - 右 |
式には、値がKnC Parameters DataSetで定義された正弦波フォース入力を0.2PIの周波数で20~40秒の間適用する単調和関数が含まれています。20~30秒の間の最初の10秒間は、フォースが正のY方向になり、次の10秒間は反対方向になります。これは、左ホイールに対して平行の横力と反対の横力をシミュレートするために行われます。 |
|
| Fz – 右 | 0 | |
| Tx – 右 | 0 | |
| Ty – 右 | 0 | |
| Tz – 右 |
式には、値がKnC Parameters DataSetで定義された正弦波トルク入力を0.2PIの周波数で40~60秒の間適用する単調和関数が含まれています。40~50秒の間の最初の10秒間は、トルクが左ホイールと同じ方向になり、次の10秒間は左ホイールと反対方向になります。これは、左ホイールに対して平行のアライニングトルクと反対のアライニングトルクをシミュレートするために行われます。 |
|
| Jack Actuation - Front | これは、ジャッキに作用するActionReactionフォースペアで、地面に対して垂直方向に反作用します。このフォースは、左と右のそれぞれが左フロントジャッキと右フロントジャッキのSolverDiff IDを指すDIF()です。 DIFが静解析および擬似静解析時に評価される場合、ソルバー微分方程式の導関数はゼロに設定されます。結果として、DIFによってフォースが生成され、測定されたホイール変位が、コマンドのホイール変位に従うよう強制されます。 |
|
| Jack Actuation - Rear | これは、ジャッキに作用するActionReactionフォースペアで、地面に対して垂直方向に反作用します。このフォースは、左と右のそれぞれが左リアジャッキと右リアジャッキのSolverDiff IDを指すDIF()です。 | |
Figure 20. Projectブラウザのビュー - Forces - Kinematics and Compliance
ジョイント
Kinematics and Compliance解析は、4つのジョイントで構成されています。
| 名前 | 説明 |
|---|---|
| Jack Dummy Fixed - Front | フロントナックルをダミーボディの前に結合し、前輪の中心に配置される固定ジョイント。 |
| Jack Dummy Fixed - Rear | リアナックルをダミーボディの後ろに結合し、後輪の中心に配置される固定ジョイント。 |
| Vehicle Body fixed to ground | 車体をグラウンドボディに結合し、車体CGに配置される固定ジョイント。 |
| Rack Dummy Ball | ラック&ピニオン式ステアリングが使用されている場合に、ラックをステアリングダミーボディに結合するボールジョイント。 |
Figure 21. Projectブラウザのビュー - Joints - Kinematics and Compliance
モーション
Kinematics and Compliance解析は、3つのモーションで構成されています。
| 名前 | 説明 |
|---|---|
| Steering motion | ステアリングホイールモーションは、ステア入力フェーズを除くイベントのすべてのフェーズでハンドルを固定するために使用されます。 このモーションは、以下の式を使用して定義されます。
この式は、ステアリング角の値がKnC Parameters DataSetで定義され、周波数が0.2PIの、ハンドルにおける正弦波入力を定義します。 |
| Front wheel motion | ホイールスピンドルモーションは、前輪とフロントスピンドル間のロックを提供し、ホイールとタイヤが回転しないようにします。 |
| Rear wheel motion | ホイールスピンドルモーションは、後輪とリアスピンドル間のロックを提供し、ホイールとタイヤが回転しないようにします。 |
Figure 22. Projectブラウザのビュー - Motions - Kinematics and Compliance
出力
Kinematics and Compliance解析は、全部で98個の出力エンティティで構成されています。これらは、大まかに2つのグループ(静的設計係数出力(SDF)と非SDF)に分けることができます。
SDF出力は、このイベントで定義されたSolverArraysを使用するサブルーチンを使用して計算されます。詳細については、ここ<SDF参照MDLドキュメントへのリンク>をご参照ください。
| 名前 | 説明 |
|---|---|
| Front left wheel reaction | 全体参照フレーム内のフロント面内ジョイント(左)におけるフォースの出力を測定し、記録します。 |
| Front right wheel reaction | 全体参照フレーム内のフロント面内ジョイント(右)におけるフォースの出力を測定し、記録します。 |
| Rear left wheel reaction | 全体参照フレーム内のリア面内ジョイント(左)におけるフォースの出力を測定し、記録します。 |
| Rear right wheel reaction | 全体参照フレーム内のリア面内ジョイント(右)におけるフォースの出力を測定し、記録します。 |
| Wheel center height – left front | 全体参照フレーム内の左前輪と左フロントジャッキ間の変位を測定し、出力します。 |
| Wheel center height – right front | 全体参照フレーム内の右前輪と右フロントジャッキ間の変位を測定し、出力します。 |
| Wheel center height – left rear | 全体参照フレーム内の左後輪と左リアジャッキ間の変位を測定し、出力します。 |
| Wheel center height – right rear | 全体参照フレーム内の右後輪と右リアジャッキ間の変位を測定し、出力します。 |
| WC displacement – left front | ホイール中心マーカー参照フレーム内の左前輪とグラウンドボディ間の変位を測定し、出力します。 |
| WC displacement – right front | ホイール中心マーカー参照フレーム内の右前輪とグラウンドボディ間の変位を測定し、出力します。 |
| WC displacement – left rear | ホイール中心マーカー参照フレーム内の左後輪とグラウンドボディ間の変位を測定し、出力します。 |
| WC displacement – right rear | ホイール中心マーカー参照フレーム内の右後輪とグラウンドボディ間の変位を測定し、出力します。 |
| Applied TP force – left front | 全体参照フレーム内の左フロントタイヤ接触パッチにおけるフォースを測定し、出力します。 |
| Applied TP force – right front | 全体参照フレーム内の右フロントタイヤ接触パッチにおけるフォースを測定し、出力します。 |
| Applied TP force – left rear | 全体参照フレーム内の左リアタイヤ接触パッチにおけるフォースを測定し、出力します。 |
| Applied TP force – right rear | 全体参照フレーム内の右リアタイヤ接触パッチにおけるフォースを測定し、出力します。 |
| Roll Angle / Track width - Front |
|
| Roll Angle / Track width - Rear |
|
| Caster/Kingpin inclination – left front |
|
| Caster/Kingpin inclination – right front |
|
| Caster/Kingpin inclination – left rear |
|
| Caster/Kingpin inclination – right rear |
|
Templates
Kinematics and Compliance解析には、2つのテンプレートが含まれています。1つ目のテンプレート“Full vehicle KnC”は、3つの出力ファイル制御ステートメントと、2つの静解析ブロック(エンティティ状態が変更され、シミュレーションの開始時刻と終了時刻が指定される)を定義します。2つ目のテンプレートは、デフォルトで非アクティブになっており、いくつかの静的設計係数に関するポストアニメーションのグラフィックスをオンにするために使用されます。これは、現時点では、試験的機能です。
| ステートメント | 説明 |
|---|---|
|
IF条件は、Vehicle Parameters DataSet内のタイヤタイプのオプションが“replace with vertical springs”に設定されている場合に、すべてのタイヤ力を非アクティブにします。 |
|
この4つのDeactivateステートメントのセットは、ホイールが動かないようにロックしていたフロントおよびリアのホイールモーションをオフにします。 |
|
静的シミュレーションを20秒間実行します。 |
|
この4つのActivateステートメントは、2つ目の静的シミュレーション命令ブロックの準備が整っているフロントおよびリアのホイールモーションをオンにします。 |
|
出力ブロックは、ソルバーが生成する必要のある結果フォーマットとファイルを定義します。 |
|
静的シミュレーションを90秒まで実行します。 |
Figure 23. Projectブラウザのビュー - Templates - Kinematics and Compliance
ジャッキシステム
Figure 24. Projectブラウザのビュー - Jack System Modeling Entities - Kinematics and Compliance
- ジャッキシステムのジョイント
- ジャッキシステムには2つのジョイントペアがあります。最初のジョイントは“Jack Trans jt”で、ジャッキボディの下端で並進ジョイントを使用してジャッキボディを地面に結合します。ジョイントはZ(垂直)方向に方向付けられます。ジョイントは、ジャッキが垂直方向にのみ動作するよう強制します。
- ジャッキシステムのベクトル
- 3つのベクトルは、全体座標系のX、Y、Zの軸に沿って定義されます。これらのベクトルは、モデル内の特定のジョイントの方向付けに使用されます。