Single Lane Change
Single Lane Change eventでは、定義された車線のセンターラインをたどるように、シングルレーンチェンジを経て車両を運転します。レーンチェンジの速度および車線の寸法を定義できます。経路に沿って走行するためにステアリングコントローラーが使用され、イベント全体を通して速度を維持するためにトルクコントローラーが使用されます。イベントでは、左右のレーンチェンジがサポートされます。結果をプロットするために、プロットテンプレートが用意されています。
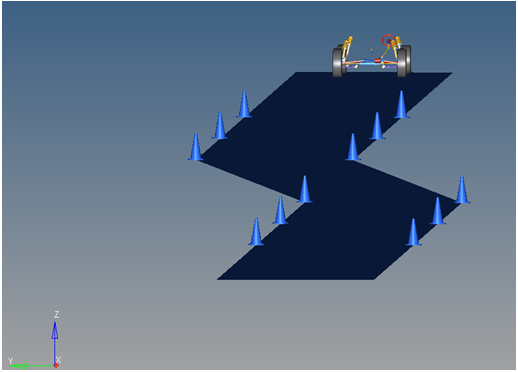
Figure 1. Single Lane Changeイベント
Figure 2. Single Lane Changeの経路の上面図
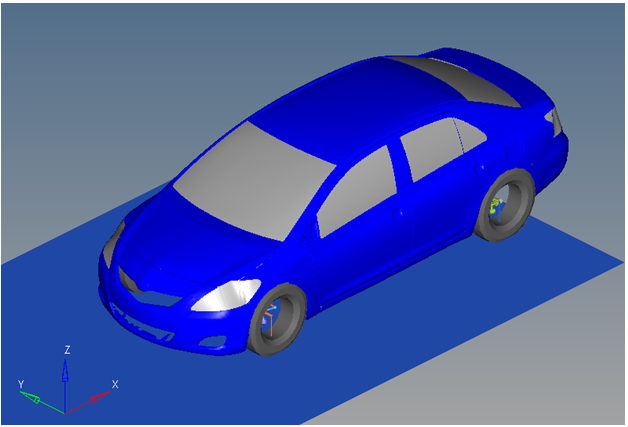
Figure 3. ボディグラフィックスが表示された車両モデル
イベントは、道路の初期直線セクション、移行セクション、およびリカバリーの直線セクションで構成されています。初期直線セクションでは、車両は定常状態になります。移行セクションでは、実際のレーンチェンジを行います。車両は最後の直線セクションに戻り、シミュレーションは終了します。車両はイベント中一定の速度を保ちます(トルクコントローラーにより)。車両のステアリングコントローラーは、経路上でボディのCGを道路のセンターラインに維持するように設計されています。
初期速度、コーンの縦方向および横方向の間隔、および車線のグラフィックスは、イベントフォームを介して変更できます。地上Z座標は計算値であり(青色の背景は計算値を示します)、左フロントタイヤ重心のZ位置から左フロントタイヤの転がり半径を減算することで算出します。
テストモデルは、このシミュレーションを60秒で実行します。約0.5の横Gが、テスト車両モデルおよびデフォルトのレーンチェンジパラメータによって発生します。速度とコーンの横方向の間隔を増やすと、車両によって発生する横フォースが増加します。車両が操縦の限界に近づくと、モデルは大幅に進路からそれるか、レーンチェンジを完了できません。Could not Find Ideal SWA in 20 Iterationsというエラーがログファイルに表示される場合があります。これは、ステアリングコントローラーが定義された経路に従えないことを示します。
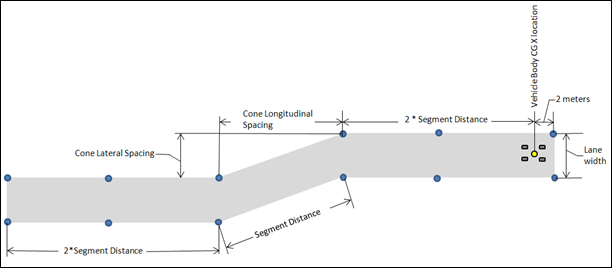
Figure 4. Single Lane Changeイベント - 道路グラフィックスのパラメータ定義
コーンの間隔(横方向および縦方向)および車線の幅は、車両の速度と合わせて変更できます。これらのパラメータを変更するには、イベントフォームを使用します。
アタッチメント
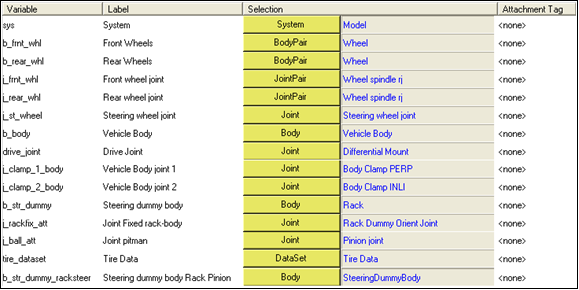
Figure 5. Single Lane Changeイベント - Attachments
| 変数 | ラベル | 説明 |
|---|---|---|
| sys | System | マスターシステム。この場合は“Model”。 |
| b_frnt_whl | mot_frnt_wheel | 前輪のボディペア。 |
| b_rear_whl | mot_rear_wheel | 後輪のボディペア。 |
| J_frnt_whl | Front Wheel Joint | 前輪をナックルに結合する回転ジョイント。 |
| J_rear_whl | Rear Wheel Joint | 後輪をナックルに結合する回転ジョイント。 |
| J_st_wheel | Steering Wheel Joint | ステアリングコラムが含まれない場合に、ハンドルをボディに、またはギアインプットシャフトをボディに結合する回転ジョイント。 |
| B_body | Vehicle Body | 車体。 |
| Drive_joint | Drive Joint | 車両の走行に使用されるジョイント。ドライブトレインに応じて異なります。通常は、エンジンに最も近いドライブトレインの回転ジョイントです。 |
| J_clamp_1_body | Vehicle Body Joint 1 | 車体のクランプ1。静的シミュレーション中に車両を固定させるために使用される2つのクランプのうちの1つ。 |
| J_clamp_2_body | Vehicle Body Joint 2 | 車体のクランプ2。静的シミュレーション中に車両を固定させるために使用される2つ目のクランプ。 |
| b_str_dummy | Steering Dummy Body | ラック&ピニオン式ステアリングシステムのラック。Parallelogramステアリングシステムではリレーロッドです。 |
| J_rackfix_att | Joint Fixed Rack-Body | ラック&ピニオン式ステアリングステアリングシステムのラックダミー方向ジョイント。ParallelogramステアリングシステムではIdler Armの球ジョイント。 |
| J_ball_att | Joint Pitman | ラック&ピニオン式ステアリングステアリングシステムのピニオンジョイント。Parallelogramステアリングシステムではピットマンアームの球ジョイント。 |
| Tire_dataset | Tire Data | タイヤシステムからの情報を含むデータセット。 |
| b_str_dummy_racksteer | Steering Dummy Body Rack Pinion | Parallelogramおよびラック&ピニオン式ステアリングステアリングシステムの両方のステアリングダミーボディ。 |
参考資料
ISO 3888-2-2011 Passenger cars — Test track for a severe lane-change maneuver
NATO Allied Vehicle Testing Publication AVTP: 03-160 Sep. 1991.
Single Lane Changeイベントの作成
-
Project BrowserでGraphicsを展開します。
路面グラフィックスは、走行する経路を示すために用意されており、シングルレーンチェンジフォームのデータを使用してパラメータで定義します。道路のグラフィックスはすべて車線の寸法を示すために使用されますが、タイヤ力の計算に使用される、実際の道路の車線寸法ではありません。道路のグラフィックスは、イベントが根本的に変更されないかぎり、編集する必要はありません。タイヤ力の計算に使用する道路は、道路のグラフィックスと同じ高さにあり、タイヤシステムで道路のファイル(.rdf)に定義します。車両ライブラリ内のデフォルトの平坦な道路のファイルは、摩擦係数が1.0の無限の大きさの平坦な道路です。道路のファイルはASCIIファイルで、編集可能です。
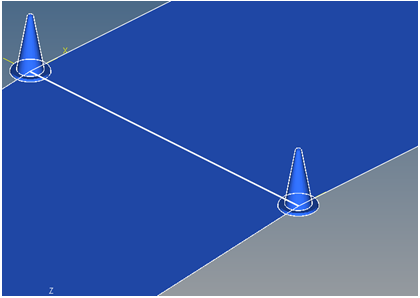
Figure 7. コーンのグラフィックス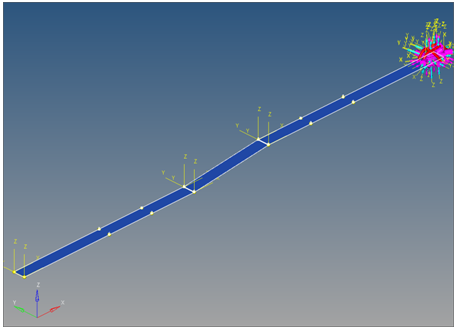
Figure 8. 道路のグラフィックス