Pulse Steer
Pulse steerイベントは、直線上を一定速度で走行中に発生するハンドルへの突然のパルス入力に対して、車両がどのように応答するかをシミュレーションします。イベントへの入力はハンドルへのトルクの場合も角度の場合もあります。ユーザーはパルス振幅とパルス幅を設定できます。パルスは、sine、step、またはramp関数として入力でき、ユーザーはその幅を制御できます。駆動トルクコントローラーを使用して、車両を一定速度に維持します。また、タイヤシステムと出力リクエストシステムには、車両とタイヤの標準出力が組み込まれています。結果をプロットするために、プロットテンプレートが用意されています。
Figure 1.
このイベントは、MotionView Assembly Wizardを使用して構築されたフルビークルモデルで動作するように設計されています。Task Wizardを使用して追加したこのイベントは、自動的にモデルに付加されます。また、イベントのアタッチメント方式に厳密に従っていれば、手動で構築したモデルでもこのイベントを使用できます。
このイベントを使用して、ハンドルへの突然のパルス入力に対する車両の応答を判断します。イベントパラメータは、イベントフォームで入力します。
ステアリングホイールの変位
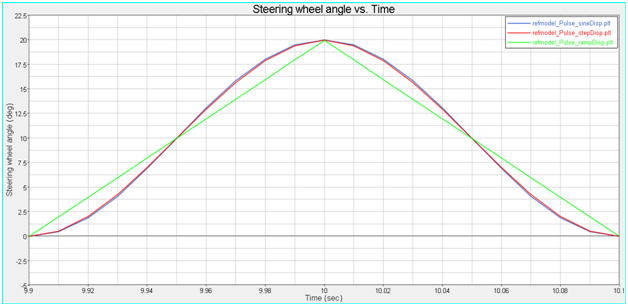
Figure 2. ステアリング入力 - 正弦波状パルス、ステップパルス、およびランプパルス
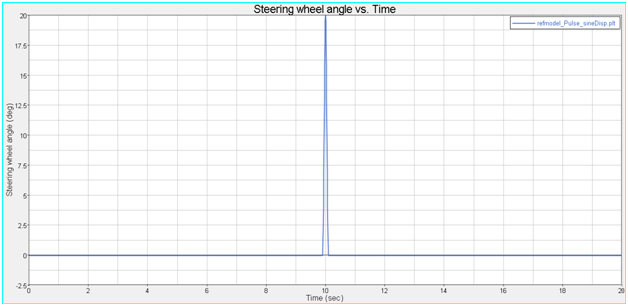
Figure 3. Pulse Steerのステアリング入力
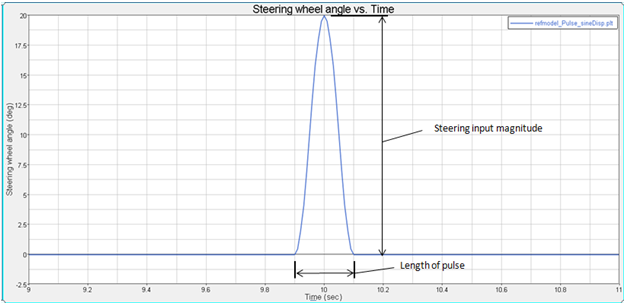
Figure 4.
イベントシーケンス
| 時間 | 説明 | 目的 |
|---|---|---|
| 0 | Statics | 車両を地面に固定しホイールをハブに固定して行う、静的解析。 |
| 0+ | ジョイント解放 | 車両を地面に固定している2つのジョイントと、ホイールをスピンドルに固定している4つのジョイントが解放されます。 |
| 0++ | 動解析 | ハンドルが0に固定され、トルクコントローラーが一定速度を維持した状態で、動的イベントが開始します。 |
| 10-1/2 (パルスの長さ) |
パルスの開始 | イベントフォームで指定した方法を使用してパルスイベントが始まります。 |
| 10+1/2 (パルスの長さ) |
パルスの終了 | イベントフォームで指定した方法を使用してパルスイベントが終了します。 |
| 20 | イベント終了 | イベントが終了します。イベントテンプレートを変更して、終了時間を変更します。 |
- ステアリングパルスの式はイベントテンプレートで定義し、イベントフォームを使用して入力したデータセット値がその式で参照されます。上級ユーザーであれば、テンプレートを編集してイベントを変更できます。
- 当社の調査では、フォース入力より変位入力の方が安定性があることが示されています。
- イベントは、無限に平坦な路面で実行されます。また、道路用グラフィックは表示されません。イベントを見やすくするには、グラフィックを追加します。
参考資料
ISO +7401-2003 – Road Vehicles-Lateral transient response test methods-Open-loop test methods.
Pulse Steerイベントの作成
数種類のモデリング要素コンテナーを使用してイベントを定義します。イベントには、1つのサブシステムとして駆動トルクコントローラーもあります。
フォースは、単一のボディまたはボディペア間にフォースまたはトルクを適用するエンティティです。イベントフォームで適用方法としてフォースを選択している場合は、トルクをハンドルに適用する際にこのイベントのフォースが使用されます。フォースのブラウザビューは次のとおりです: