Braking In a Turn
Braking in a Turn eventは、円形路で減速する車両をシミュレートします。このイベントの目的は、ブレーキと旋回を行った際の車両の安定性を測定することです。車両は指定した長さの直進路を走行してから円形路に入ります。ブレーキをかけた時点から、ブレーキ持続時間の間、目標の減速率が得られるように、ブレーキのトルクが増加します。イベントはシミュレーション時間の終了とともに終了します。
Figure 1. Braking in a Turn event
Figure 2. Braking in a Turn eventの上面図
Figure 3. ボディグラフィックスが表示された車両モデル
| 時間 | 説明 | 詳細 |
|---|---|---|
| 0 | 静的解析 | 車両に関する静的解析が実行されます。 |
| 0+ | 固定ジョイントの解放 | 車両を地面に留めている2つのジョイントが解放され、ホイールをナックルに留めている4つのジョイントも解放されます。イベントテンプレートには、ジョイントを解放するコマンドが含まれます。 |
| 不定 | 直進 | 車両は導入長の距離を直進します。この距離は、円周の¼です。速度は、目標の横加速度とトラック半径を使用して計算されます。 |
| 不定 | 定常円旋回 | ステアコントローラーによって、車両は半径が一定の円周上を旋回し、定常コーナリング状態になります。 |
| ユーザー定義 | ブレーキの適用開始 | 制動適用時点でブレーキがかけられます。制動は、0Gから始まって目標の減速が得られるように、ブレーキ手順の間で増加します。 |
| 終了 | シミュレーションの終了 | シミュレーション終了時間に入ります。 |
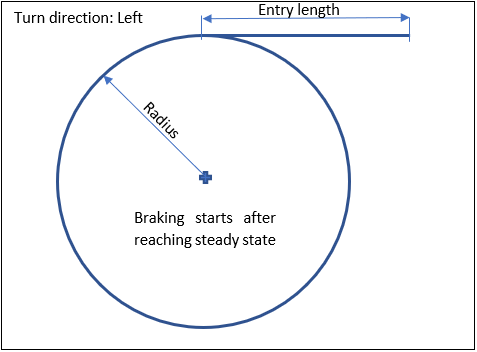
Figure 4. Braking in a Turnテスト用の経路
- 制動イベントが始まるまで、駆動トルクコントローラーを使用して車両が一定速度で走行します。
- ステアコントローラーによって、ハンドルまたはステアリングギアの入力シャフトでのモーションを使用して、ここの説明にあるように車両が走行します。
- 車両速度は、横加速度、円の半径、および方程式v=sqrt(radius*acceleration)を使用して計算されます。モデルの単位(mmと秒)に変換するには、いくつかの単位変換用の係数が必要です。
- ブレーキトルクコントローラーによって、目標とする減速が維持されます。
- ブレーキ時間とイベント終了時間を入力するのはユーザーの役割です。これらの値は、車両がさまざまな入力に対応するために必要な経路と時間に対応している必要があります。
イベントを定義するために9タイプのモデリング要素コンテナーが使用されています。このイベントには、4つのサブシステムとして、出力リクエスト、ステアコントローラー、駆動トルクコントローラー、およびブレーキトルクコントローラーが関与しています。
データセット
このシステムでは、Braking in a Turn eventを記述するデータを収めたデータセットが1つ使用されています。このイベントでは、横加速度、円の半径、旋回方向(左または右)、シミュレーション終了時間、ブレーキをかける時点、目標とする減速、およびブレーキ手順の時間を設定できます。初期速度、ホイール回転速度および地面の高さは計算された値で、変更できません。
フォーム
フォームは、レーンチェンジイベントを変更する唯一の場所です。変更できるパラメータは、横加速度、円の半径、ブレーキをかける時点、シミュレーション終了時間、目標とする減速、およびブレーキ手順の時間です。旋回方向は左か右のいずれかで、ユーザー側で決定します。地上のz座標は計算値です。タイヤデータフォームでホイール重心のZ位置とタイヤ転がり半径を使用して計算されます。
グラフィックス
1つのグラフィックスがイベントに定義されています。グラフィックスは、路面グラフィックスを定義し、ユーザーが入力する必要はありません。グラフィックスの詳しい説明をここに記載します。
スキッドパッドのグラフィックスは、走行する経路を示すために用意され、Braking in a Turn eventフォームのデータを使用するパラメータで定義されます。スキッドパッドのグラフィックスは、イベントが根本的に変更されないかぎり、編集する必要はありません。
ジョイント
Braking in a Turn eventにはボールジョイントが1つあります。このジョイントは、ダミーボディをステアリングラックに結合します。このジョイントは、ADAMSで特定のイベントが機能できるように設けられています。モデルを手動で構築する場合は、ダミーボディをステアリングラックに結合します。
マーカー
Braking in a Turn eventにはイベントが1つあります。経路の原点は、スキッドパッドグラフィックスの原点であり、車体の重心になるようにパラメータで定義されます。マーカーはポイントを指し示し、ポイントにはパラメータのロジックが含まれます。
モーション
3つのモーションがイベントに組み込まれています。ステアリングモーションは、車両を操縦するためにステアコントローラーによって与えられ、ハンドルを車体に結合する回転ジョイントに作用します。モデルにステアリングコラムがない場合、このジョイントはステアリングラック入力軸と車体の間で機能します。
前輪と後輪のモーションは、ホイールハブをナックルに結合する、ホイールスピンドルの回転ジョイントに作用します。ホイールがナックルに固定されていることから、当初のこのモーションは0なので、モデルは静的に収束します。動解析でタイヤが回転できるように、当初の静解析の後、このモーションは非アクティブになります。
ポイント
2つのポイントがイベント内で定義されています。すべてのポイントを使用してスキッドパッドのグラフィックスが作成されます。ポイントには、それらのX、Y、Zの位置を定義するパラメータのロジックが格納されます。ポイントは変更しないでください。
ソルバー変数
Braking in a Turn eventは、1つのソルバー変数のSteer Path変数のみで構成されています。この変数は、必要な経路に沿って走行するためにハンドルに入力を適用するユーザーサブルーチンを呼び出します。
- 番号
- 説明
- 5020
- ブランチID。5020はBraking in a Turn eventです。
- 70000000
- Driver Model Controllerデータを含むソルバー配列のID。この配列は、ステアコントローラーシステムにあります。
- 70000100
- 車両情報を記述した車両データ配列のID。この配列は、ステアコントローラーシステムにあります。
- 30
- 円の半径の値。
Templates
テンプレートはソルバー固有で、MotionSolveテンプレートのみがドキュメント化されています。テンプレートは、</Model>コマンドの後にソルバーデックに挿入され、イベントの実行を制御します。
<ResOutput
angle_type = "YPR"
/>
<ResOutput
mrf_file = "TRUE"
/>
<ResOutput
plt_file = "TRUE"
/>
<H3DOutput
switch_on = "TRUE"
increment = "1"
/>
<ResOutput
abf_file = "TRUE"
/>
{if (tire_dataset.opt_omega.ival ==1)}
<!--Initial static analysis -->
<Simulate
analysis_type = "Static"
end_time = "0.0"
/>
{endif}
<Deactivate
element_type = "MOTION"
element_id = "{mot_frnt_wheel.l.idstring}"
/>
<Deactivate
element_type = "MOTION"
element_id = "{mot_frnt_wheel.r.idstring}"
/>
<Deactivate
element_type = "MOTION"
element_id = "{mot_rear_wheel.l.idstring}"
/>
<Deactivate
element_type = "MOTION"
element_id = "{mot_rear_wheel.r.idstring}"
/>
{if (tire_dataset.opt_omega.ival ==2)}
<!--Initial static analysis -->
<Simulate
analysis_type = "Static"
end_time = "0.0"
/>
{endif}
<Deactivate
element_type = "JPRIM"
element_id = "{j_clamp_1_body.idstring}"
/>
<Deactivate
element_type = "JPRIM"
element_id = "{j_clamp_2_body.idstring}"
/>
<Motion_Joint
id = "{wh_motion.idstring}"
expr = "VARVAL({sv_str_path.idstring})"
/>
<Simulate
analysis_type = "Transient"
end_time = "{ds.end_of_sim.value}"
num_steps = "{ds.end_of_sim.value*50}"
/>
<Stop/>参考資料
ISO 7376-2006 - Passenger cars - Braking in A Turn - Open-loop test method.