J-turn
J-turn eventでシミュレートする運転では、ある方向に大きく旋回する操作の後、車両が応答できるような待機時間を置き、さらに反対方向に大きく旋回する操作の後、別途応答時間を置きます。このイベントは、車両の安定性を明らかにするために使用されます。ステアリング入力の符号を逆にすることによって、どちらの操縦方向にすることも可能です。駆動トルクコントローラーを使用して、車両を一定速度に維持します。また、タイヤシステムと出力リクエストシステムには、車両とタイヤの標準出力が組み込まれています。結果をプロットするために、プロットテンプレートが用意されています。
このイベントにより適切な名前はフィッシュフック操縦です。このイベントは、DOT公表資料のDOT HS 809 705、”Phase VIII of NHTSA's Light Vehicle Rollover Research Program-A Demonstration of the Dynamic Tests Developed for NHTSA's NCAP Rollover Rating System”で説明されているNHTSAフィッシュフックテストをシミュレートできるよう設計されています。
Figure 1. J-turnイベント
このイベントは、MotionView Assembly Wizardを使用して構築されたフルビークルモデルで動作するように設計されています。Task Wizardを使用して追加したこのイベントは、自動的にモデルに付加されます。また、イベントのアタッチメント方式に厳密に従っていれば、手動で構築したモデルでもこのイベントを使用できます。
このイベントの説明としてより適切なのは、フィッシュフックテストです。J-turnは、第2ステア角を0に設定することで実行できます。イベントの設定とシーケンスは次のとおりです。イベントフォームのデフォルト値は、車両に対してきわめて控え目な入力となっています。J-turnに関する既刊文献では、一般に、ステアリング角が360度でステアリング入力速度が300度/秒以上となっています。入力パラメータをNHTSAテスト仕様に適合させるには、他の車両特性化テストからのパラメータを測定する必要があります。
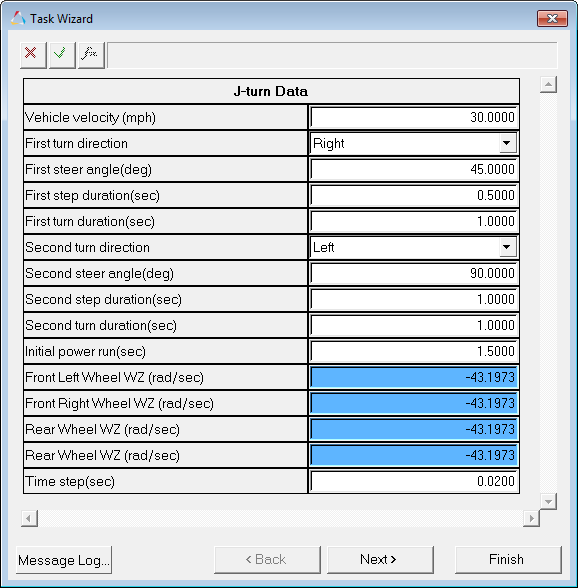
Figure 2. J-turn Dataダイアログ
| 入力 | 単位 | 説明 |
|---|---|---|
| Vehicle Velocity | MPH | 初期車両速度。 |
| First Turn Direction | 右または左 | 使用しません。 |
| First Steer Angle | 度数 | 最初のステアリング入力の角度(度)です。正の数では車両が右に、負の数では車両が左に曲がります。 |
| First Step Duration | 秒 | 1回目のステア角の入力に必要な時間。ハンドルに対する角度を入力するために、ステップ関数が使用されます。 |
| First Turn Duration | 秒 | ステアリングを1回目のステア角に保持する時間。 |
| Second Turn Direction | 右または左 | 使用しません。 |
| Second Steer Angle | 度数 | 2度目のステアリング入力の角度(度数)です。正の数では車両が左に、負の数では車両が右に曲がります。 |
| Second Step Duration | 秒 | 2回目のステア角の入力に必要な時間。この角度の入力にはステップ関数を使用します。この関数では、入力として2回目の旋回期間と2回目のステア角を使用します。 |
| Second Turn Duration | 秒 | 車両のステアリングを、入力されたSecond steer angleで固定しておく時間です。イベントは、2回目の旋回継続時間が始まってから1.5秒後に終了します。 |
| Initial Power Run | 秒 | イベントの開始時の時間です。この時間は、一般に、車両が定常状態の速度であることを確認するために使用されます。このイベントでは、イベント開始時に、さらに0.5秒の時間が追加されます。 |
| Front Left Wheel WZ | ラジアン/秒 | 右前輪の回転速度。これは計算値のため、変更しないでください。 |
| Front Right Wheel WZ | ラジアン/秒 | 左前輪の回転速度。これは計算値のため、変更しないでください。 |
| Rear Wheel WZ | ラジアン/秒 | 右後輪の回転速度。これは計算値のため、変更しないでください。 |
| Rear Wheel WZ | ラジアン/秒 | 左後輪の回転速度。これは計算値のため、変更しないでください。 |
| Time Step | 秒 | 出力データの時間ステップ。タイムステップの秒数ごとにデータが出力ファイルに書き込まれます。 |

Figure 3.
イベントのシーケンスは次のとおりです:
| 時間 | ラベル | 説明 |
|---|---|---|
| 0 | Statics | 静解析は、地面に固定された車両に対して実行されます。 |
| 0+ | Joint release | 車両を地面に固定している2つのジョイントと、各ホイールをスピンドルに固定しているジョイントが解除されます。 |
| 0++ | Begin dynamics | 動的シミュレーションが開始されます。ハンドルは、J-turn Steer Motionソルバー変数によって定義されている入力に従います。 |
| .5 + Initial Power Run | Start First Steer event | 最初のステアリング入力が開始されます。ステップ関数によって、ステアリングホイールが第1ステップ継続時間内に0から1回目のステア角まで回転します。 |
| + First Step Duration | End first steer event/begin first steer hold | 最初の操縦イベントが完了し、1回目の旋回継続時間が始まります。入力した2回目のステア角に、ステアリングホイールが保持されます。 |
| +First Turn Duration | Steer hold complete/begin second step input | ステアリングの固定が完了し、2度目のステアリング入力が開始されます。2回目のステアリング入力は、2回目のステア角と2回目のステップ期間を入力として使用するステップ関数です。 |
| +Second Step Duration | Second steer input complete | 2回目のステア入力が完了し、この時点から2回目のステップ継続時間の間、ホイールが保持されます。得られるステア角は、1回目と2回目の入力の正味角であることに注意してください。 |
| +Second Turn Duration | Second steer hold is complete | ステアリングは、2回目の旋回期間の間保持されます。 |
| +1.5秒 | Vehicle reaction time | ステアリングが固定されたままになります。 |
| Event end | 終了 | イベントが終了します。 |
- 1回目の旋回方向と2回目の旋回方向のパラメータは、このイベントでは使用されません。1回目のステア角と2回目のステア角の符号を変更して、ステア方向を反転します。
- イベントは、HyperStudyを使用してパラメトリックに実行可能です。
- イベントには、路面のグラフィック表現は含まれません。車両は、タイヤシステムに.rdfファイルを使用して定義した平坦な路面上を走行します。
イベントを定義するために、6種類のモデリング要素コンテナーを使用します。イベントには2つのサブシステム(出力リクエストと駆動トルクコントローラー)もあります。
データセット
このシステムでは、J-turn eventを記述するデータを収めたデータセットが1つ使用されています。イベントでは、J-turnを定義する2つのステアリング入力のために、曲がる方向とタイミングを設定できます。ホイールWZ(初期回転速度)は計算された値であり、変更できません。
フォーム
フォームは、イベントのデータを変更する必要のある唯一の場所です。ステア入力のタイミングと大きさは、フォーム上で変更できます。ホイールのWZ値は、イベントフォーム上で入力した初期速度と、タイヤシステムフォームにあるタイヤ転がり半径を使用して計算されます。
ジョイント
J-turn eventにはボールジョイントが1つあります。このジョイントは、ダミーボディをステアリングラックに結合します。このジョイントは、ADAMSで特定のイベントが機能できるように設けられています。モデルを手動で構築する場合は、ダミーボディをステアリングラックに結合します。
モーション
3つのモーションがイベントに組み込まれています。車両に対するステアリングモーションは、ステアコントローラーによって提供され、ステアリングコラムを車体に接合する回転ジョイントに作用します。モデルにステアリングコラムがない場合、このジョイントはステアリングラック入力軸と車体の間で機能します。
前輪と後輪のモーションは、ホイールハブをナックルに結合する、ホイールスピンドルの回転ジョイントに作用します。ホイールがナックルに固定されていることから、当初のこのモーションは0なので、モデルは静的に収束します。タイヤが回転できるように、静的平衡解析の後、モーションは非アクティブ化されます。
ソルバー変数
J-turn eventは、1つのソルバー変数(J-turn Steer Motionソルバー変数)のみで構成されています。このソルバー変数は、ハンドル入力モーション関数です。この関数は、イベントフォームの入力を使用して作成され、イベントテンプレートでステアリングモーション入力として割り当てられます。
Templates
J-turn eventタスクにはテンプレートが1つあります。このテンプレートはソルバー固有で、MotionSolveテンプレートのみがドキュメント化されています。テンプレートは、</Model>コマンドの後にソルバーデックに挿入され、イベントの実行を制御します。
<ResOutput
angle_type = "YPR"
/>
<ResOutput
mrf_file = "TRUE"
/>
<ResOutput
plt_file = "TRUE"
/>
<H3DOutput
switch_on = "TRUE"
increment = "1"
/>
<ResOutput
abf_file = "TRUE"
/>
{if (tire_dataset.opt_omega.ival ==1)}
<!--Initial static analysis -->
<Simulate
analysis_type = "Static"
end_time = "0.0"
/>
{endif}参考資料
ISO +7401-2003 – Road Vehicles-Lateral transient response test methods-Open-loop test methods.