Straight Line Braking
Straight Line Braking eventは、直線経路上で減速する車両をシミュレートします。通常、ハンドルは固定されていますが、解放することもできます。車両を減速させるためにBrake torque controllerがホイールにトルクを適用し、適切な出力リクエストが組み込まれています。結果をプロットするために、プロットテンプレートが用意されています。
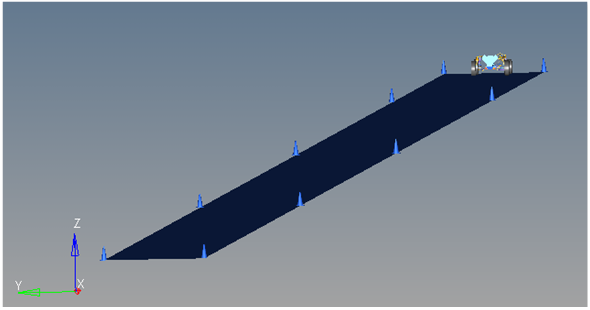
Figure 1. Straight Line Braking event

Figure 2. Straight Line Braking eventの上面図
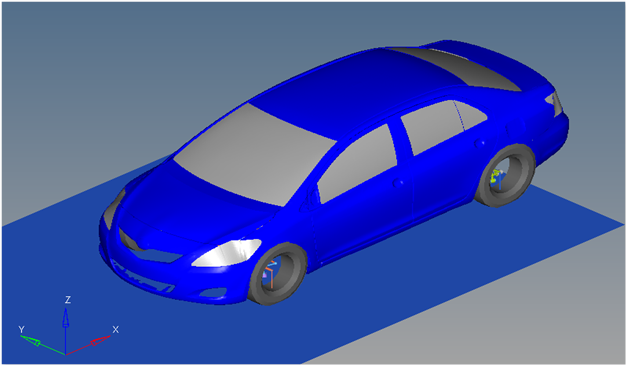
Figure 3. ボディグラフィックスが表示された車両モデル
説明
Straight Line Braking eventは、MotionViewAssembly Wizardを使用して構築したフルビークルモデルで動作するように設計されています。Task Wizardを使用して追加したこのイベントは、自動的にモデルに付加されます。イベントのアタッチメント方式が厳密に順守されていれば、手動で構築したモデルでもこのイベントを使用できます。
- 時間
- 説明
- 0~1秒
- イベントのFormに入力された初期速度(デフォルトは50mph)で車両が定常状態に落ち着きます。
- 1~2秒
- 定常状態から規定の減速率への移行。
- 2~4秒
- 車両は定常状態で減速します。
初期速度と目標加速度はイベントフォームで変更できます。ステアリング状態を変更して、ロックまたはフリーにすることもできます。
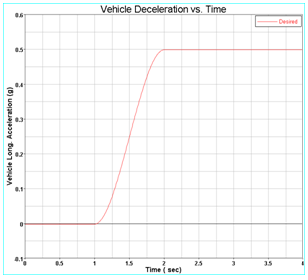
Figure 4. Vehicle Deceleration vs. Time
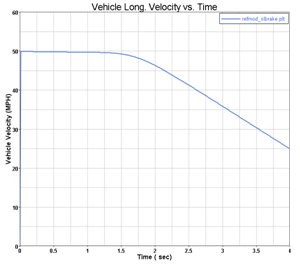
Figure 5. Straight Line BrakingイベントのVehicle Speed vs. Time
アタッチメント
イベントは標準のイベントアタッチメントを使用します。Model Wizardを使用してモデルを構築している場合、アタッチメントは自動的に定義されます。アタッチメントには、イベントが解析を実行するために必要な最小限のデータが格納されています。アタッチメントは、大半のイベントで標準です。カーブ
このイベントにはカーブが1つ組み込まれています。このカーブはイベントでは使用されませんが、直線上を走行するイベントに切り替える場合のために組み込まれています。直線運転を行うには、Steering controllerを手動で追加する必要があります。データセット
システム内ではデータセットが1つ使用され、そこにはStraight line brakingイベントを記述するために使用するデータが格納されています。イベントでは、車両の初期速度、車線の幅、目的の加速度、ステアリング状態(ロックまたはフリー)を設定できます。データセットの値はFormを使用して変更します。ホイール回転速度およびGround z Coordinateは計算された値で、変更できません。フォーム
Formは、Straight line brakingイベントを変更する唯一の場所です。変更可能なパラメータは、車両の速度、目的の加速度、ステアリング状態です。ステアリング状態は、ユーザーの要件によって、ロックまたはフリーにできます。グラフィックス
11のグラフィックスがイベント内で定義されています。グラフィックスは、コーンと直線道路のグラフィックスを定義し、ユーザーが入力する必要はありません。グラフィックスの詳しい説明をここに記載します。
道路のグラフィックスは、走行経路を示すために組み込まれて、Straight line braking Form内のデータを使用してパラメータで定義されています。道路のグラフィックスはすべて車線の寸法を示すために使用されますが、タイヤ力の計算に使用される、実際の道路の車線寸法ではありません。道路のグラフィックスは、イベントが根本的に変更されないかぎり、編集する必要はありません。
タイヤ力を計算するために使用される道路は、道路のグラフィックスと同じ高さで、タイヤシステム内の道路のファイル(rdf)によって定義されます。車両ライブラリ内のデフォルトの平坦な道路のファイルは、摩擦係数が1.0の無限の大きさの平坦な道路です。道路のファイルはASCIIファイルで、編集可能です。
ジョイント
Straight line brakingイベントには球ジョイントが1つ組み込まれています。ジョイントは、ダミーボディをステアリングラックに付加します。ジョイントは、特定のイベントをADAMSで動作させるために含まれています。モデルを手動で構築する場合にダミーボディをステアリングラックに付加します。マーカー
Straight line brakingイベントには5つのマーカーが組み込まれています。経路の原点は、すべてのレーンチェンジグラフィックスの原点で、車体のCGになるようにパラメータで定義されます。マーカーはポイントを指し示し、ポイントにはパラメータのロジックが含まれます。
経路のアウトラインマーカーは、XYZ位置のPath Outlineポイントを指し示します。これらのマーカーは車線のグラフィックスを定義するために使用されます。どのマーカーにもユーザー入力は必要ありません。
モーション
3つのモーションがイベントに組み込まれています。車両のハンドル操作を行うために、ステアリングコントローラーによって、ステアリングモーションが使用されます。ステアリングコラムが組み込まれている場合、ハンドルのジョイントにはジョイントが作用します。ステアリングコラムが組み込まれていない場合、ハンドルのジョイントにはモーションが作用します。ステアリングコラムが組み込まれていないラック&ピニオン式ステアリングシステムでは、ステアリングラックをダミーボディに接合する並進ジョイントに対してモーションが作用します。
Front Wheel MotionおよびRear Wheel Motionは、ホイールのハブをナックルに繋ぐホイールのスピンドル回転ジョイントに作用します。ホイールがナックルに固定されていることから、当初のこのモーションは0なので、モデルは静的に収束します。タイヤが回転できるように、静的収束の後、モーションは非アクティブ化されます。
ポイント
15のポイントがイベント内で定義されています。ポイントはすべて、車線のグラフィックスと、車線を示すために使用するコーンのグラフィックスを作成するために使用されます。これらのポイントは、そのX、Y、Zの位置を定義するパラメータロジックを備えています。ポイントは変更しないでください。Templates
Straight line brakingイベントタスクにはテンプレートが組み込まれています。このテンプレートはソルバー固有で、MotionSolveテンプレートのみがドキュメント化されています。このテンプレートは、</Model>コマンドの後にソルバーデックに挿入されて、このイベントの実行を制御します。<ResOutput
angle_type = "YPR"
/>
<ResOutput
mrf_file = "TRUE"
/>
<ResOutput
plt_file = "TRUE"
/>
<H3DOutput
switch_on = "TRUE"
increment = "1"
/>
<ResOutput
abf_file = "TRUE"
/>
{if (tire_dataset.opt_omega.ival ==1)}
<!--Initial static analysis -->
<Simulate
analysis_type = "Static"
end_time = "0.0"
/>
{endif}
<Deactivate
element_type = "MOTION"
element_id = "{mot_frnt_wheel.l.idstring}"
/>
<Deactivate
element_type = "MOTION"
element_id = "{mot_frnt_wheel.r.idstring}"
/>
<Deactivate
element_type = "MOTION"
element_id = "{mot_rear_wheel.l.idstring}"
/>
<Deactivate
element_type = "MOTION"
element_id = "{mot_rear_wheel.r.idstring}"
/>
{if (tire_dataset.opt_omega.ival ==2)}
<!--Initial static analysis -->
<Simulate
analysis_type = "Static"
end_time = "0.0"
/>
{endif}
<Deactivate
element_type = "JPRIM"
element_id = "{j_clamp_1_body.idstring}"
/>
<Deactivate
element_type = "JPRIM"
element_id = "{j_clamp_2_body.idstring}"
/>
{if ds.str_type.value == "Free"}
<Deactivate
element_type = "MOTION"
element_id = "{mot_steer.idstring}"
/>
{endif}
<Simulate
analysis_type = "Transient"
end_time = "4"
print_interval = "0.01"
/>
<Stop/>参考資料
ISO +21994-2007 - Passenger cars - Stopping distance at straight-line braking with ABS - Open loop test method