タイヤのキネマティクス、フォースおよびモーメントを計算するためのユーティリティ
タイヤのキネマティクス、フォースおよびモーメントを計算するために、以下のユーティリティが用意されています:
ACTCLC
- C 呼び出しシーケンス:
SUBROUTINE ACTCLC(TRAMAT, VEL, OMEGA, OMEGAR, RADIUS, RNORM,VLON, VCPLON, VCPLAT, VCPVRT,ALPHA, GAMMA, KAPPA,URAD, CPMTX)- 引数
-
引数 タイプ 説明 シンボル TRAMAT 3,3配列 入力 ISOから路面軸座標系への変換マトリックス 
VEL 3配列 入力 ISOにおけるホイールキャリアの速度 
OMEGA 3配列 入力 ISOにおけるホイールキャリアの角速度 
OMEGAR 倍精度 入力 ホイールの角速度 
RADIUS 倍精度 入力 ホイールの荷重半径 
RNORM 3配列 入力 路面軸座標系における路面法線単位ベクトル 
VLON 倍精度 出力 ISOにおけるタイヤの縦方向の速度 
VCPLON 倍精度 出力 SAEにおける接触パッチの縦方向の速度 
VCPLAT 倍精度 出力 SAEにおける接触パッチの横方向の速度 
VCPRVT 倍精度 出力 SAEにおける接触パッチの垂直方向の速度 
ALPHA 倍精度 出力 SAEにおけるスリップ角 
GAMMA 倍精度 出力 傾斜角度 
KAPPA 倍精度 出力 SAEにおけるスリップ率 
URAD 3配列 出力 ホイール中心から路面のCPまでの単位ベクトル 
CPMTX 3,3配列 出力 SAEから路面軸座標系への変換マトリックス 
- 計算
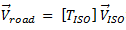
- 路面参照フレーム内のホイール中心の速度は次のとおりです:
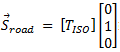
路面参照フレーム内のスピン軸は次のとおりです:
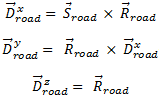
接触パッチの座標系は、変換マトリックスによって定義されます:

ここで、Dは接触パッチに対応する方向の単位ベクトルを表します:
ホイール中心の縦方向の速度は次の式で与えられます:

ホイール中心からCPの方向の単位ベクトルの向き:

タイヤの面に沿ったタイヤの半径は次のとおりです:

路面参照フレーム内の剛体上の別のポイントにおける速度を検出するために、タイヤに剛体の法則が適用されます:

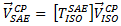
接触パッチ参照フレーム内の速度は次のとおりです:

SAE軸座標系は、ISO軸座標系のY軸とZ軸が反転するように定義されます。その結果が、ISO座標系からSAE座標系にベクトルを移行するための次の変換マトリックスです:

SAE軸座標系内の接触パッチ速度のさまざまな成分は次の方程式で計算できます:
縦方向の速度成分はSAE座標系とISO座標系で同じなため、入れ替えることができます。その結果、スリップ角とスリップ率のSAE定義は次のようになります:

傾斜角度は、路面の法線とホイール中心から接触パッチへのベクトル間の角度です:


XCP2HB
- C 呼び出しシーケンス:
SUBROUTINE XCP2HB(FCP, TCP, RAD, TRNMTX, FORCES, TORQUE)- 引数
-
引数 タイプ 説明 シンボル FCP 3配列 入力 SAEにおける接触パッチ力 
TCP 3配列 入力 SAEにおける接触パッチトルク 
RAD 3配列 入力 ホイール中心から接触パッチまでの動径ベクトル 
CPMTX 3,3配列 入力 SAEから路面軸座標系への変換マトリックス 
FORCE 3配列 出力 路面参照フレーム内のハブのフォース 
TORQUE 3配列 出力 路面参照フレーム内のハブのトルク 
- 計算
- フォースのホイール中心への平行移動と路面参照フレームへの移動:
路面参照フレームへの移動に続く、ホイール中心へのトルクの平行移動:

XCP2HB_ISO
- C 呼び出しシーケンス:
SUBROUTINE XCP2HB (FCP, TCP, RAD, TRAMAT, FORCE, TORQUE)- 引数
-
引数 タイプ 説明 シンボル FCP 3配列 入力 ISOにおける接触パッチ力 
TCP 3配列 入力 ISOにおける接触パッチトルク 
RAD 3配列 入力 ホイール中心から接触パッチまでの動径ベクトル 
TRAMAT 3,3配列 入力 ISOから路面軸座標系への変換マトリックス FORCE 3配列 出力 路面ISOにおけるハブのフォース 
TORQUE 3配列 出力 路面ISOにおけるハブのトルク 
- 計算
- フォースのホイール中心への平行移動と路面参照フレームへの移動:

路面参照フレームへの移動に続く、ホイール中心へのトルクの平行移動:

ACTFZ
- C 呼び出しシーケンス:
SUBROUTINE ACTFZ(VCPVRT, RADIUS, TIREK, TIREC, UNLRAD,FRCRAD, ERRMSG, IERR)- 引数
-
引数 タイプ 説明 シンボル VCPVRT 倍精度 入力 垂直方向の接触パッチ速度(SAE座標) 
RADIUS 倍精度 入力 タイヤの荷重半径 
TIREK 倍精度 入力 タイヤ垂直剛性 
TIREC 倍精度 入力 タイヤ垂直減衰 
UNLRAD 倍精度 入力 無荷重半径 
FRCRAD 倍精度 出力 タイヤ接地力 - 半径方向 
ERRMSG 文字配列 出力 エラーメッセージ IERR 整数 出力 エラーコード - 計算
