フロントマルチリンク
マルチリンク式サスペンションという名称は、3つ以上のリンクから構成されていることに由来しています。MotionViewのマルチリンク式サスペンションは、4つのリンクを持ち、一般に乗用車やオフロード車で使用されます。このサスペンションでは各リンクの位置を独立して決めることができるため、デザイナーは柔軟な設計ができます。
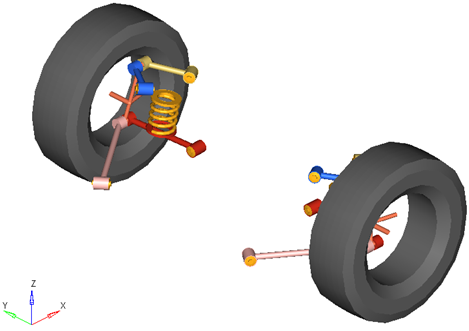
Figure 1. フロントマルチリンク式サスペンション
モデルでの使用
front multi-linkは、ハーフカービークル解析とフルビークル解析のどちらでも使用できます。デフォルトの形状および質量は乗用車または小型トラックと同じですが、モデルおよびデータは、大型トラックから縮尺モデルの車まで、任意のサイズの車両を反映するように修正できます。
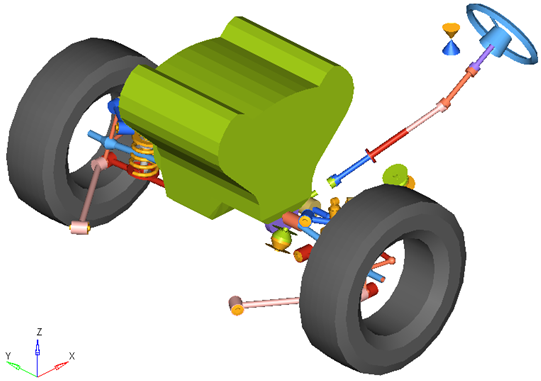
Figure 2. マルチリンク式サスペンションを使用する車両フロント半分のモデル
以下の図では、すべてのデータが読み込まれたフロントサスペンションモデルのシステムがProject Browserのビューに表示されています。フロントマルチリンク式サスペンションシステムには、4つの”子”システムがあります。
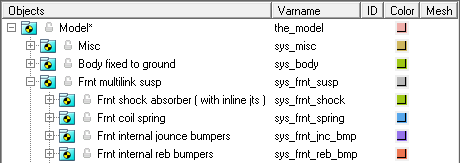
Figure 3. マルチリンク式サスペンションを使用するフロントハーフビークルモデルのシステムおよびサブシステムのブラウザ表示
Note:
- ホイールボディは、タイヤおよびリムの質量と慣性を表します。
- ホイールハブボディは、ブレーキローターなど、回転する他のボディの質量と慣性を表しますが、サスペンションを駆動する場合、このボディではハーフシャフトの質量と慣性は使われません。ホイールハブおよびブレーキローターには、関連するグラフィックスはありません。
- ホイールおよびホイールハブのパーツでは、重心としてWheel CGの位置が使用されます。
- 各ボディの重心(CG)は、ボディの形状から推定されます。その数式はPointパネルにコード化されていて、グラフィカルユーザーインターフェースで表示できます。より正確なCG位置がわかる場合は、それを使用してください。
- サスペンションのナックルとステアリングタイロッドのポイントの間の球ジョイントの位置を指定するポイントは、ステアリングシステム内にあります。
Tip:
- Assembly Wizardを使用すると、サスペンションとサブシステムとの多彩な組み合わせを構築できます。グラフィカルユーザーインターフェースを使用して、システムを構築し、作成したモデルを理解することをお勧めします。
新しいサスペンションモデルを構築するときは、モデルに含まれるオプションのシステム(スタビライザーバーなど)をすべて使用してモデルを構築します。Project Browserを使用してオプションのシステムを直ちにオフにし、ベースサスペンションに対する解析を実行して適切な解が得られるようにします。オプションのシステムでデータを利用できるようになったら、これらオプションのシステムをアクティブにしてデータを読み込みます。
Figure 2. マルチリンク式サスペンションを使用する車両フロント半分のモデル
Figure 3. マルチリンク式サスペンションを使用するフロントハーフビークルモデルのシステムおよびサブシステムのブラウザ表示
ポイント
ポイントによって、サスペンションのボディを互いに結合するジョイントとブッシュの位置を定めます。以下の図に、front multi-linkサスペンションの主要ポイントを示します。
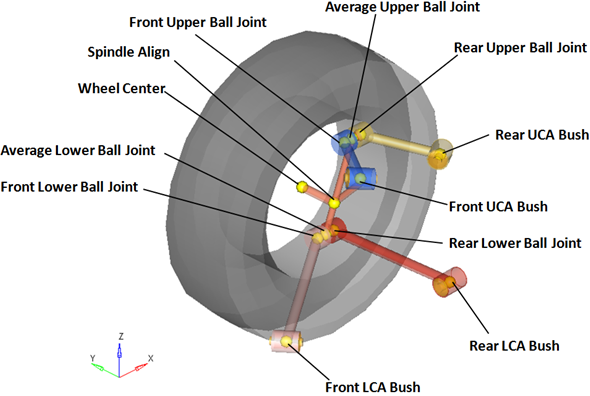
Figure 4. 右側の主要ポイント – フロントマルチリンク式サスペンション
Figure 4. 右側の主要ポイント – フロントマルチリンク式サスペンション
Note: 上の図では、わかりやすいように、サスペンションの左側、ボディの重心位置を規定するポイント、およびオプションのサブシステム(スプリング、ダンパ、バンプストップ、およびスタビライザーバー)の位置を規定するポイントは省略されています。
ボディ
front multi-linkサスペンションは、以下の図に示すボディで構成されています。
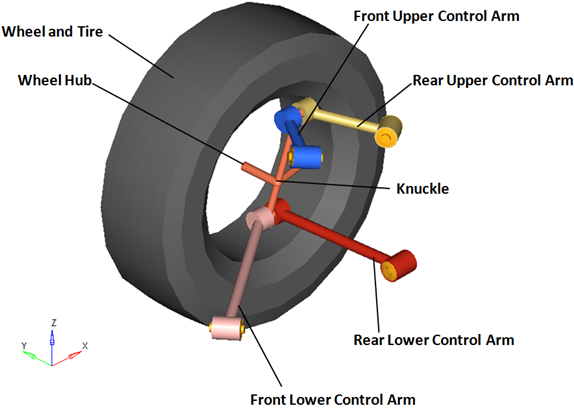
Figure 5. 右側のボディ – フロントマルチリンク式サスペンション
ホイールハブボディには関連するグラフィックスがないため、上の図では示されていません。Figure 5. 右側のボディ – フロントマルチリンク式サスペンション
Note: オプションのサブシステムにより、ボディがサスペンションに追加されることがあります。例えば、ショックアブソーバーにより、2つのボディ(ショックロッドとショックチューブ)が追加されます。オプションのサブシステムで追加されたボディは、わかりやすいように、上の図からは省略されています。
ブッシュおよびジョイント
以下の表に、front multi-linkのボディ、ブッシュ、およびジョイントを示します。
以下の図に、サスペンションでのジョイントとブッシュの位置を示します。
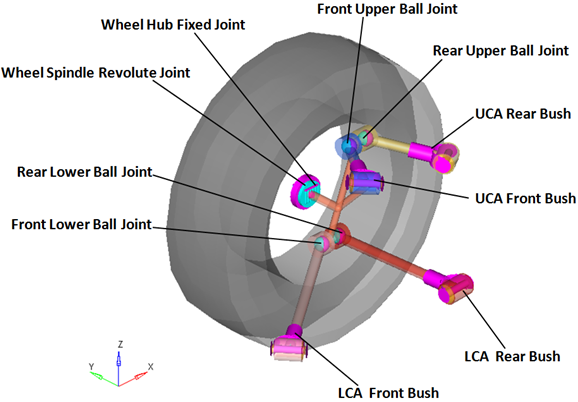
Figure 6. 右側のジョイントおよびブッシュ – 2つのロアコントロールアームがあるフロントマクファーソンストラット式サスペンション
Note: 表では、わかりやすくするために、左側のジョイントは省略されています。
| ラベル | Type | Body 1 | Body 2 | Point | 註 |
|---|---|---|---|---|---|
| Front Lower Ball Joint | 球 | ナックル | フロントロアコントロールアーム | フロントのロア球ジョイント | CompliantオプションがNoに設定されると、このジョイントのコンプライアンスは“オフ”に設定され、純粋な球ジョイントとして動作します。 |
| Rear Lower Ball Joint | 球 | ナックル | リアロアコントロールアーム | リアのロア球ジョイント | CompliantオプションがNoに設定されると、このジョイントのコンプライアンスは“オフ”に設定され、純粋な球ジョイントとして動作します。 |
| Front Upper Ball Joint | 球 | ナックル | フロントアッパーコントロールアーム | フロントのアッパー球ジョイント | CompliantオプションがNoに設定されると、このジョイントのコンプライアンスは“オフ”に設定され、純粋な球ジョイントとして動作します。 |
| Rear Upper Ball Joint | 球 | ナックル | リアアッパーコントロールアーム | リアのアッパー球ジョイント | CompliantオプションがNoに設定されると、このジョイントのコンプライアンスは“オフ”に設定され、純粋な球ジョイントとして動作します。 |
| Wheel Spindle | 回転 | ホイールハブ | ナックル | ホイール中心 | |
| Wheel Hub Fix Jt |
固定ジョイント | ホイール | ホイールハブ | ホイール中心 | Spindle complianceオプションがYesに設定されると、ジョイントタイプがユニバーサルに変更されます。 |
| LCA Front Bush | ユニバーサル | フロントのロアコントロールアーム | サブフレーム、車体、または地面 | フロントロアコントロールアームブッシュ | CompliantオプションがNoに設定されると、このジョイントのコンプライアンスは“オフ”に設定され、純粋なユニバーサルジョイントとして動作します。 |
| LCA Rear Bush | ユニバーサル | リアのロアコントロールアーム | サブフレーム、車体、または地面 | リアロアコントロールアームブッシュ | CompliantオプションがNoに設定されると、このジョイントのコンプライアンスは“オフ”に設定され、純粋なユニバーサルジョイントとして動作します。 |
| UCA Front Bush | ユニバーサル | フロントのアッパーコントロールアーム | サブフレーム、車体、または地面 | フロントアッパーコントロールアームブッシュ | CompliantオプションがNoに設定されると、このジョイントのコンプライアンスは“オフ”に設定され、純粋なユニバーサルジョイントとして動作します。 |
| UCA Rear Bush | ユニバーサル | リアのアッパーコントロールアーム | サブフレーム、車体、または地面 | リアアッパーコントロールアームブッシュ | CompliantオプションがNoに設定されると、このジョイントのコンプライアンスは“オフ”に設定され、純粋なユニバーサルジョイントとして動作します。 |
Figure 6. 右側のジョイントおよびブッシュ – 2つのロアコントロールアームがあるフロントマクファーソンストラット式サスペンション
類似サスペンション
front MacPherson strut (1pc LCA)
front MacPherson strut (2pc LCA)
リアダブルウィッシュボーン式サスペンション(1pc LCA)
リアダブルウィッシュボーン式サスペンション(2pc LCA)