事前定義された経路
CONSTANT RADIUS
[FEEDFORWARD_STEERING]
TAG = 'FEEDFORWARD'
LOOK_AHEAD_TIME = 0.5
PATH = 'PREDEFINED'
BLOCK = ‘PATH'
INTEGRATION_STEP_SIZE = 0.01
[PATH]
TYPE = 'CONSTANT_RADIUS'
RADIUS = 40
INITIAL_STRAIGHT = 10
ENTRY_ANGLE = 0.39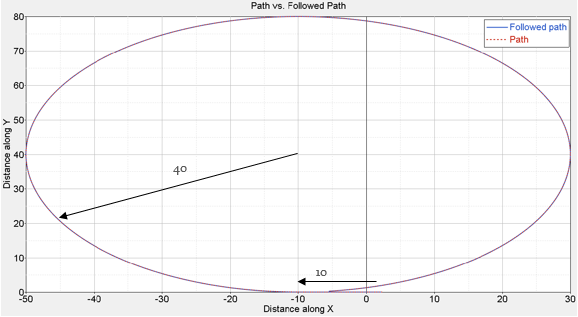
Figure 1.
| [CONSTANT RADIUS] | ||
|---|---|---|
| TYPE | 属性-文字列 | 必須 <CONSTANT_RADIUS> |
| RADIUS | 属性-実数 | 必須 円の半径 |
| INITIAL_STRAIGHT | 属性-実数 | 必須 旋回に入る前の初期直線の長さ |
| TURN | 属性-文字列 | オプション
|
| ENTRY_ANGLE | 属性-実数 | オプション この値を指定すると、直線経路が終了した後、一定半径の経路に入る前に曲率が最終的な曲率まで線形に増加する過渡的な長さが追加されます。 この進入角度は、一定半径の経路に入る位置で車両が直線部分に対して成す角度を定義します。この角度が大きいほど、過渡的な部分が長くなります。 |
SLALOM
[FEEDFORWARD_STEERING]
TAG = 'FEEDFORWARD'
LOOK_AHEAD_TIME = 0.5
PATH = 'PREDEFINED'
BLOCK = ‘PATH'
INTEGRATION_STEP_SIZE = 0.01
[PATH]
TYPE = 'SLALOM'
NUMBER_OF_CONES = 3
DESIRED_CG_LATERAL_DISP = 3
CONE_SPACING = 50
RECOVERY_LENGTH = 20
INITIAL_STRAIGHT = 20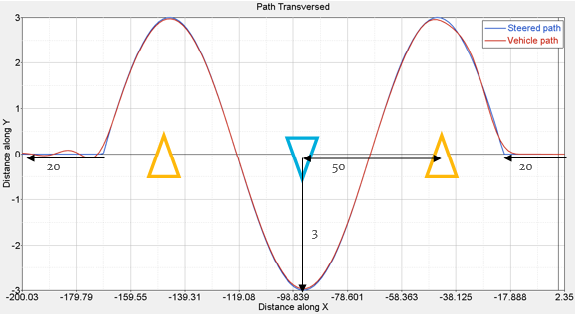
Figure 2.
| [SLALOM] | ||
|---|---|---|
| TYPE | 属性-文字列 | 必須 <SLALOM> |
| NUMBER_OF_CONES | 属性-整数 | 必須 コーンの数 |
| DESIRED_CG_LATERAL_DISP | 属性-実数 | 必須 希望する重心の横変位 |
| CONE_SPACING | 属性-実数 | 必須 隣接するコーン間の距離 |
| INITIAL_STRAIGHT | 属性-実数 | 必須 スラロームに入る前の直線部 |
| RECOVERY_LENGTH | 属性-実数 | 必須 スラロームが終わった後の直線部 |
| ATTACK_DIRECTION | 属性-文字列 | オプション
|
SINGLE LANE CHANGE
[FEEDFORWARD_STEERING]
TAG = 'FEEDFORWARD'
LOOK_AHEAD_TIME = 0.5
PATH = 'PREDEFINED'
BLOCK = 'PATH'
INTEGRATION_STEP_SIZE = 0.01
[PATH]
TYPE = 'SLC'
LATERAL_OFFSET = 3
SECTION_1 = 20
SECTION_2 = 20
SECTION_3 = 50
TURN_DIRECTION = 'LEFT'
ENTRY_ANGLE = 0.04963
MAX_CURVATURE = 1.42857e-02
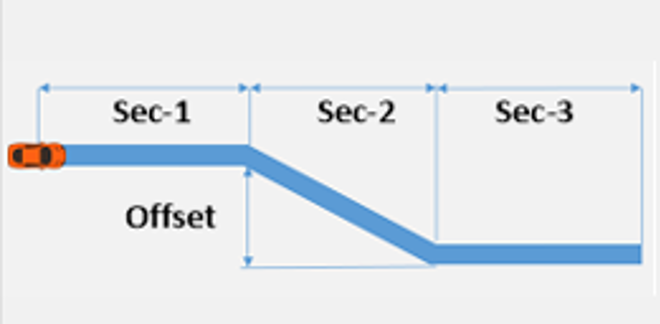
Figure 3.
| [SINGLE LANE CHANGE] | ||
|---|---|---|
| TYPE | 属性-文字列 | 必須 <SLC> |
| LATERAL_OFFSET | 属性-整数 | 必須 2つのレーン間の横方向距離。 |
| SECTION_1 | 属性-実数 | 必須 第1レーンの縦方向距離。 |
| SECTION_2 | 属性-実数 | 必須 2つのレーン間の縦方向距離。 |
| SECTION_3 | 属性-実数 | 必須 第2レーンの縦方向距離。 |
| TURN_DIRECTION | 属性-実数 | オプション
|
| ENTRY_ANGLE | 属性-実数 | オプション 指定すると、レーン変更区間への移行が容易になります。 ENTRY_ANGLEは、レーンの直線部分と、レーン変更区間において曲率がゼロになるときの直線との成す角度です。 第1レーンと第2レーンのコーナーで使用します。 |
| MAX_CURVATURE | 属性-実数 | オプション 指定すると、レーン変更区間への移行が容易になります。 MAX_CURVATUREは、レーンのコーナーでレーン変更区間に発生する最大曲率です。 第1レーンと第2レーンのコーナーで使用します。 |
DOUBLE LANE CHANGE
[FEEDFORWARD_STEERING]
TAG = 'FEEDFORWARD'
LOOK_AHEAD_TIME = 0.5
PATH = 'PREDEFINED'
BLOCK = ‘PATH'
INTEGRATION_STEP_SIZE = 0.01
[PATH]
TYPE = 'DLC'
SECTION_1 = 20
SECTION_2 = 20
SECTION_3 = 20
SECTION_4 = 20
SECTION_5 = 50
TURN_DIRECTION = 'LEFT'
ENTRY_ANGLE_1 = 0.04963
MAX_CURVATURE_1 = 1.42857e-02
ENTRY_ANGLE_2 = 0.04963
MAX_CURVATURE_2 = 1.42857e-02
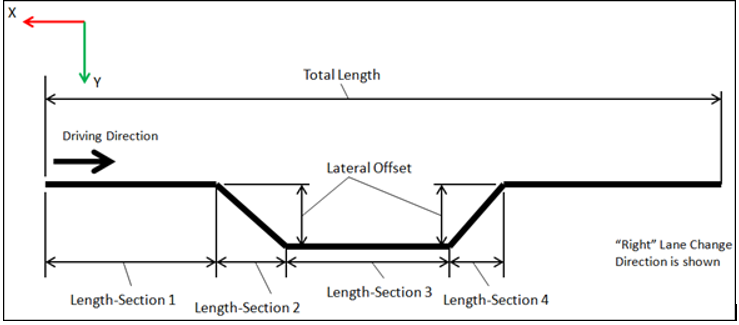
Figure 4.
| [DOUBLE LANE CHANGE] | ||
|---|---|---|
| TYPE | 属性-文字列 | 必須 <DLC> |
| LATERAL_OFFSET | 属性-整数 | 必須 2つのレーン間の横方向距離。 |
| SECTION_1 | 属性-実数 | 必須 第1レーンの縦方向距離。 |
| SECTION_2 | 属性-実数 | 必須 第1レーンと第2レーン間の縦方向距離。 |
| SECTION_3 | 属性-実数 | 必須 第2レーンの縦方向距離。 |
| SECTION_4 | 属性-実数 | 必須 第2レーンと第3レーン間の縦方向距離。 |
| SECTION_5 | 属性-実数 | 必須 第3レーンの縦方向距離。 |
| TURN_DIRECTION | 属性-実数 | オプション
|
| ENTRY_ANGLE_1 | 属性-実数 | オプション 指定すると、レーン変更区間への移行が容易になります。 ENTRY_ANGLE_1は、レーン変更区間が最大曲率の位置に向かい、さらに隣のレーンで曲率がゼロになるまで継続するときに、レーンの直線部分に対して成す角度です。 第1レーンと第2レーンのコーナーで使用します。 |
| MAX_CURVATURE_1 | 属性-実数 | オプション 指定すると、レーン変更区間への移行が容易になります。 MAX_CURVATURE_1は、レーンのコーナーでレーン変更区間に発生する最大曲率です。 第1レーンと第2レーンのコーナーで使用します。 |
| ENTRY_ANGLE_2 | 属性-実数 | オプション 指定すると、レーン変更区間への移行が容易になります。 ENTRY_ANGLE_2は、レーン変更区間が最大曲率の位置に向かい、さらに隣のレーンで曲率がゼロになるまで継続するときに、レーンの直線部分に対して成す角度です。 第3レーンと第4レーンのコーナーで使用します。 |
| MAX_CURVATURE_2 | 属性-実数 | オプション 指定すると、レーン変更区間への移行が容易になります。 MAX_CURVATURE_2は、レーンのコーナーでレーン変更区間に発生する最大曲率です。 第3レーンと第4レーンのコーナーで使用します。 |