追加のAltair Driver Fileブロック群
以下のセクションは、Altair Driver Fileに必須、もしくはオプションであるかのいずれかです:
Header
$-------------------------ALTAIR_HEADER
[ALTAIR_HEADER]
FILE_TYPE = 'ADF'
FILE_VERSION = 1.0
FILE_FORMAT = 'ASCII'| タイプ | 必須条件 | |
|---|---|---|
| [HEADER] | 必須 | |
| BLOCK NAME | 文字列 | 必須 |
| FILE_TYPE | 属性-文字列 | 必須
|
| FILE_VERSION | 属性-実数 | 必須 = 1.0 |
| FILE_FORMAT | 属性-文字列 | オプション 現時点ではオプション。将来の強化用には必須 |
Units
[UNITS]
(BASE)
{length force angle mass time}
'meter' 'newton' 'radians' 'kg' 'sec'- 単位は、大文字小文字を区別しない – meter、Meter、METER、MeTerはいずれも同じと解釈される
- Unitsブロックは、全てのタイプのデータファイルがドライバーによって読み出されるために必要
| 寸法 | オプション | SIへの変換係数 |
|---|---|---|
| Length | meter、meters または m foot、feet または ft mile またはmiles millimeter、millimeters または mm inch、inches または in |
1.0 0.3048 1609.344 0.001 0.0254 |
| Force | Newton Dyne Knewton Ounce_Force Kilogram_Force または Kgf Kpound_Force Pound_Force または lbf |
1.0 0.00001 1000 0.27801 9.80665 4448.2216 4.4482216 |
| Angle | Radian、radians、rad または r Degrees、degree、deg または d |
1.00 0.017453 |
| Mass | Kg、kilogram または kilograms G、gram または grams Pound、pounds、lb または lbs |
1.0 0.001 0.453592 |
| Time | sec、second または seconds milliseconds、millisecond、millisec、millisecs または ms |
1.0 0.001 |
Signal_Global_setting
[THROTTLE_STANDARD]
MAX_VALUE = 1
MIN_VALUE = 0
SCALING_FACTOR = 1
SMOOTHING_FREQUENCY = 5
INITIAL_VALUE = 0.0| タイプ | 必須条件 & コメント | |
|---|---|---|
| [STEERING_STANDARD] | オプション | |
| BLOCK NAME | 文字列 | 必須 ステアリング出力上のグローバル設定 |
| MAX_VALUE | 属性-実数 | オプション Upper bound |
| MIN_VALUE | 属性-実数 | オプション Lower bound |
| SMOOTHING_FREQUENCY | 属性-実数 | オプション この振動数を上回る信号の変化をカット(ローパスフィルター) |
$---------------------------STEERING_STANDARD
[STEER_STANDARD]
MAX_VALUE = 6.28
MIN_VALUE = -6.28
SMOOTHING_FREQUENCY = 5
INITIAL_VALUE = 0.0
$----------------------------THROTTLE_STANDARD
[THROTTLE_STANDARD]
MAX_VALUE = 1
MIN_VALUE = 0
SMOOTHING_FREQUENCY = 5
INITIAL_VALUE = 0.0
$----------------------------BRAKING_STANDARD
[BRAKE_STANDARD]
MAX_VALUE = 1
MIN_VALUE = 0
SMOOTHING_FREQUENCY = 5
INITIAL_VALUE = 0.0
$----------------------------GEAR_STANDARD
[GEAR_STANDARD]
MAX_VALUE = 6
MIN_VALUE = 1
INITIAL_VALUE = 1
$----------------------------CLUTCH_STANDARD
[CLUTCH_STANDARD]
MAX_VALUE = 1
MIN_VALUE = 0
INITIAL_VALUE = 0.0| タイプ | 必須条件 & コメント |
|---|---|
| [THROTTLE_STANDARD] | オプション STEERING_STANDARDブロックと同様のパラメータ。 |
| [BRAKE_STANDARD] | オプション STEERING_STANDARDブロックと同様のパラメータ。 |
| [CLUTCH_STANDARD] | オプション STEERING_STANDARDブロックと同様のパラメータ。 |
| [GEAR_STANDARD] | オプション STEERING_STANDARDブロックと同様のパラメータ。 例外: GEAR_STANDARD SCALING_FACTOR、SMOOTHING、およびFEEDBACK_FREQUENCYの各属性はない |
MANEUVERS_LIST
$------------------------------------------MANEUVERS_LIST
[MANEUVERS_LIST]
{name simulation_time h_max print_interval}
'GO_STRAIGHT' 2.0 0.001 0.01
'LEFT_TURN' 12.0 0.001 0.001
'RIGHT_TURN' 10.0 0.001 0.001| タイプ | 必須条件 & コメント | |
|---|---|---|
| [MANEUVERS_LIST] | 必須 | |
| BLOCK NAME | 文字列 | 必須 <MANEUVERS_LIST> |
| MANEUVERS_TABLE | テーブル | 必須 運転操作の数 * 4 |
| MANEUVERS_TABLE | ||
| COLUMN 1 | 属性-文字列 | 必須 <name> 運転操作情報のブロック名のリスト。 |
| COLUMN 2 | 属性-実数 | 必須 <simulation_time> 運転操作の移行が行われる際のシミュレーション時間。終了条件のいずれも真ではない、もしくは、終了条件が定義されていない場合。 |
| COLUMN 3 | 属性-実数 | 必須 <h_max> 運転操作についての最大ソルバーステップサイズ |
| COLUMN 4 | 属性-実数 | 必須 <print_interval> 運転操作についての出力間隔 |
MANEUVERS
[LEFT_TURN]
TASK = 'STANDARD'
(CONTROLLERS)
{DRIVER_SIGNAL PRIMARY_CONTROLLER ADDITIONAL_CONTROLLER}
STEER OL_LEFT_STEER NONE
THROTTLE FEED_FORWARD_TRACTION NONE
BRAKE FEED_FORWARD_TRACTION NONE
(END_CONDITIONS)
{SIGNAL GROUP ABS OPERATOR VALUE TOLERANCE WATCH_TIME}
ROLL_ANGLE 0 Y SS 0 0.05 0.5
TIME 0 N GT 12 0.001 0.0
STEER 1 Y GT 6.0 0.001 0.0
$------------------------------------------------------------------------| タイプ | 必須条件 & コメント | |
|---|---|---|
| [{MANEUVERS_TABLE(0 ,0)}] | 必須 | |
| BLOCK NAME | 文字列 | 必須 |
| TASK | 属性-文字列 | オプション 異なる運転操作のタイプについて将来の開発のためのプレースホルダー |
| (CONTROLLERS) | サブブロック | 必須 運転操作に必要なコントローラーのリストを有したテーブルを含む |
(CONTROLLERS) REQUIRED
| DRIVER_SIGNAL CONTROLLER_NAME Map |
テーブル | 必須 |
| COLUMN 1 | 属性-文字列 | <DRIVER_SIGNAL> アクティブなドライバー出力信号のリスト。リストは下記を含んでいる必要あり: 必須のプライマリ信号
オプションのプライマリ信号 (マニュアルトランスミッションにのみ必須)
追加のコントローラーは、名称ADDITIONALで切り替えが可能。 リストは、1つの原信号のインスタンスおよび複数のADDITIONALのインスタンスのみ含むことが可能。 |
| COLUMN 2 | 属性-実数 | <PRIMARY_CONTROLLER > プライマリコントローラーのブロック名。 プライマリコントローラーは、ドライバー信号出力の投入を担当。 |
| COLUMN 3 | 属性-実数 | <ADDITIONAL_CONTROLLER > 追加のコントローラーのブロック名。 *すべてのコントローラーが追加のコントローラーとして追加できるわけではない。 *Example: PID with Feedforward traction controller. |
| END_CONDITIONS | サブブロック | 必須 |
| SUB_BLOCK_NAME | 文字列 | 必須 名前は“END_CONDITIONS”にする必要があります。 |
| TABLE | 文字列 | 必須 運転操作の終了条件 |
| COLUMN1 | 文字列 | 必須 <SIGNAL> 信号名のキーワード |
| COLUMN2 | 整数 | 必須 <GROUP> そのグループの固有の番号。同じグループ信号はOR結合され、異なるグループ番号の信号はAND結合される。 |
| COLUMN3 | ブール | 必須 <ABS> 絶対値。 真の場合、信号の絶対値が比較される。 |
| COLUMN4 | 文字列 | 必須 <OPERATOR>
|
| COLUMN5 | 実数 | 必須 <VALUE> 比較値 |
| COLUMN6 | 実数 | 必須 <TOLERANCE> 比較の許容値 |
| COLUMN7 | 実数 | 必須 <WATCH TIME> 条件が初めて真となると直ちに、この指定時間の値について全てのセンサーが観察される。観察時間について条件が連続的に真となると、センサーは作動される。 |
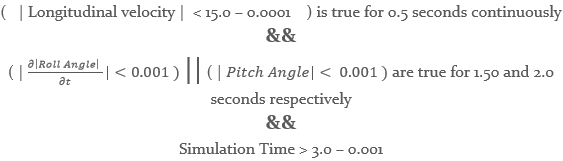
$Example ADF end conditions block
(END_CONDITIONS)
{SIGNAL GROUP ABS OPERATOR VALUE TOLERANCE WATCH_TIME}
LONG_VEL 0 Y LT 15.0 0.001 0.50
ROLL_ANGLE 1 Y SS 0.0 0.0001 1.50
PITCH_ANGLE 1 Y ET 0.0 0.0001 2.0
TIME 2 N GT 3.0 0.001 0.00
$-----------------------------------------------------------------------
| 信号名 | 意味 | 出力リクエストID | コメント | コンポーネント |
|---|---|---|---|---|
| TIME | シミュレーション時間 | NA | NA | NA |
| DIS | 移動距離 | REQ/70000066 | ドライバー出力 | F2 |
| LONG_VEL | 縦方向の速度 | REQ/70000068 | ドライバー入力(2) | F2 |
| LAT_VEL | 横方向の速度 | REQ/70000068 | ドライバー入力(2) | F3 |
| LONG_ACC | 横方向の加速度 | REQ/70000069 | ドライバー入力(3) | F2 |
| LAT_ACC | 横方向加速度 | REQ/70000069 | ドライバー入力(3) | F3 |
| YAW_RATE | ヨーレート | REQ/70000068 | ドライバー入力(2) | F4 |
| ROLL_RATE | ロールレート | REQ/70000068 | ドライバー入力(2) | F6 |
| PITCH_RATE | ピッチレート | REQ/70000068 | ドライバー入力(2) | F7 |
| CG_X | 車両重心位置 X | REQ/70000067 | ドライバー入力(1) | F2 |
| CG_Y | 車両重心位置 Y | REQ/70000067 | ドライバー入力(1) | F3 |
| CG_Z | 車両重心位置 Z | REQ/70000067 | ドライバー入力(1) | F4 |
| ROLL_ANGLE | ロール角 | REQ/70000067 | ドライバー入力(1) | F6 |
| YAW_ANGLE | ヨー角 | REQ/70000067 | ドライバー入力(1) | F4 |
| PITCH_ANGLE | ピッチ角 | REQ/70000067 | ドライバー入力(1) | F7 |
| ENG_SPD | エンジン回転数 | REQ/70000068 | ドライバー入力(2) | F8 |
| STEER | ステア角 | REQ/70000066 | ドライバー出力 | F2 |
| THROTTLE | スロットル信号 | REQ/70000066 | ドライバー出力 | F3 |
| BRAKE | ブレーキ信号 | REQ/70000066 | ドライバー出力 | F4 |
| GEAR | ギア信号 | REQ/70000066 | ドライバー出力 | F6 |
| CLUTCH | クラッチ信号 | REQ/70000066 | ドライバー出力 | F7 |