ドライバー要求ファイル(DDF)
ドライバー経路をデカルト座標系でのセンターラインポイント群のテーブルとして定義することが可能です。ドライバーは、節点間の補間にAKIMA補間法を使用します。
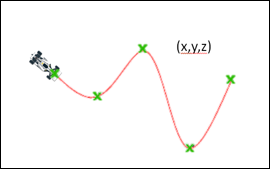
Figure 1.
Figure 1.
[ALTAIR_HEADER]
FILE_TYPE = 'DDF'
FILE_VERSION = 1.0
FILE_FORMAT = 'ASCII'
[UNITS]
(BASE)
{length force angle mass time}
'm' 'newton' 'degrees' 'kg' 'sec'
[DEMAND_VECTORS]
{X Y Z}
2.1000 0.0000 0.0000
1.1000 0.1050 0.0000
0.1001 0.2200 0.0000
-0.8995 0.3451 0.0000
-1.8989 0.4803 0.0000
-2.8979 0.6256 0.0000
-3.8964 0.7810 0.0000
-4.8942 0.9466 0.0000
-5.8913 1.1224 0.0000
-6.8876 1.3084 0.0000
-7.8830 1.5046 0.0000
-8.8773 1.7111 0.0000
-9.8705 1.9278 0.0000
-10.8624 2.1549 0.0000
-11.8530 2.3922 0.0000次のように、上記の経路にはフィードフォワードコントローラーブロックからアクセスできます。
[FEEDFORWARD_STEERING]
TAG = 'FEEDFORWARD'
LOOK_AHEAD_TIME = 0.5
PATH = 'DDF'
FILE = 'example.ddf'
INTEGRATION_STEP_SIZE = 0.01
AGGRESSIVE = ‘TRUE’
DDFを使用して、要求経路のデカルト座標に対応する速度プロファイルまたは加速度プロファイルを定義することもできます。
DDFでの加速度または速度プロファイルの定義。
例
[ALTAIR_HEADER]
FILE_TYPE = 'DDF'
FILE_VERSION = 1.0
FILE_FORMAT = 'ASCII'
[UNITS]
(BASE)
{length force angle mass time}
'm' 'newton' 'degrees' 'kg' 'sec'
[DEMAND_VECTORS]
{X Y Z DA}
0 0 0 3
-1 0 0 3
-2 0 0 3
-3 0 0 3
-4 0 0 3
-5 0 0 3
-6 0 0 3
-7 0 0 3
-8 0 0 3
-9 0 0 3
-10 0 0 3
-11 0 0 3
-12 0 0 3
-13 0 0 3
-14 0 0 3
-15 0 0 3
DDFからの要求加速度信号は、以下のようにADFの要求加速度ブロックによってでアクセスできます。
$-----------------------------------------------------------DEMAND_ACC
[DEMAND_ACC]
TYPE = 'CURVE'
FILE = 'example.ddf'
DEMAND_VECTOR = 'DA'