ホイールポスト
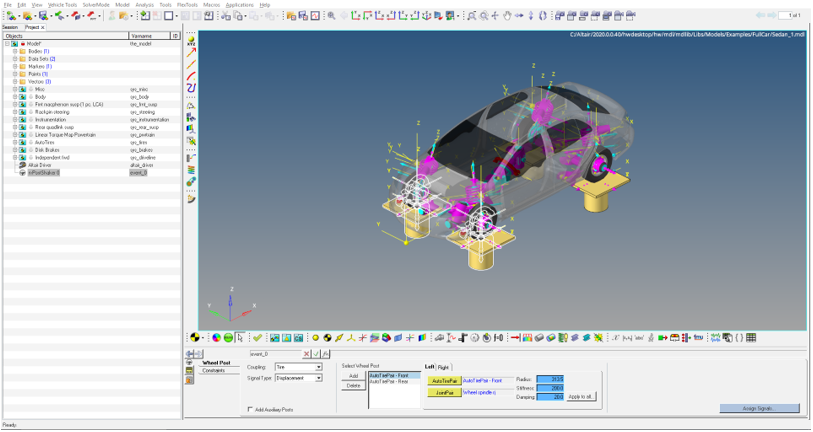
Figure 1. AutoTireごとに追加されたポスト
結合
次の2つの方法を使用して、AutoTireのホイールボディをホイールポストに結合できます:- スピンドルでの結合
- ホイールの中心で、ホイールポストの垂直方向モーションにホイールボディが拘束されます。ホイールボディは、ホイールポストを基準として、縦方向と横方向に自由に移動し、任意の方向に回転します。Note:
- ホイールポストは、方向ジョイントによって地面と結合しています。
- ホイールボディは、面内ジョイントによってジャッキボディと結合しています。

Figure 2. スピンドルでの結合 - タイヤとの結合
- タイヤを表現する線形剛性と減衰を通じてポストとホイールボディが結合します。この剛性と減衰によるフォースは、ホイールボディとポストとの間でグローバルZ方向に作用します。以下のパネルに示すように、Radius、Stiffness、Dampingの各値を入力します。これらのパラメータは、指数値を1.0に設定したIMPACT関数で使用されます。この関数は、パラメータがプラグインされた以下の形式をとります。
`IMPACT( DZ({mrk_onWheel.idstring},{mrk_onJack.idstring},{mrk_onJack.idstring}), VZ({mrk_onWheel.idstring},{mrk_onJack.idstring},{mrk_onJack.idstring}), {ds_actData.real_tireRadius.value}, {ds_actData.real_tireStiffness.value}, 1.0, {ds_actData.real_tireDamping.value}, 0.001)`‘Apply to all’オプションを使用して、すべてのホイールポストでRadius、Stiffness、Dampingの各値を更新します。
Note:- ホイールポストは、方向ジョイントによって地面に拘束されています。
- ソルバー入力ファイルをエクスポートする前に、AutoTireシステムは非アクティブになります。

Figure 3. タイヤとの結合
信号タイプ
Displacement、Force/Moment、Accelerationの各信号をホイールポストに入力できます。- Displacement信号
- Force/MomentNote: ‘Add Wheel Reaction Forces’オプションをチェックしている場合は、静的シミュレーションの終了後、ホイールでの反作用力が計算され、ユーザーが指定したZ方向のフォース信号に加算されます。このフォース信号がホイールポストに適用され、これはn-Postシグナルマネージャーで確認できます。
- Acceleration:加速度は、まず変位に変換され、続いてその変位が適用されます。
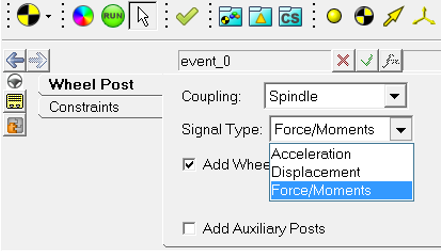
Figure 4. 信号タイプ
パネルにある他のオプション
- 車両のタイヤが‘AutoTire’ではない場合、パネルの‘Add’ボタンを使用してホイールポストを手動で追加する必要があります。‘Delete’ボタンを使用すると、選択したポストが削除されます。
Figure 5. AutoTireがない場合に手動で追加したホイールポスト - AutoTireに追加したホイールポスト同様に、各ホイールポストには3つのアタッチメントとして、ボディ、ポイント、ジョイントがあります。Note:
- 上記の結合の項で説明したように、面内ジョイントにはボディとポイントの各アタッチメントが必要です。
- ジョイントアタッチメントは、ホイールをロックするために使用します。
- Add Auxiliary Posts:空力をシミュレーションするために、ポストを追加してホイール以外の車両部品(シャーシなど)を励振する必要がある場合は、このオプションをチェックして、新しいタブとしてAuxiliary Postを追加します。

Figure 6. パネルのさまざまなオプション