FTireとMotionViewの統合
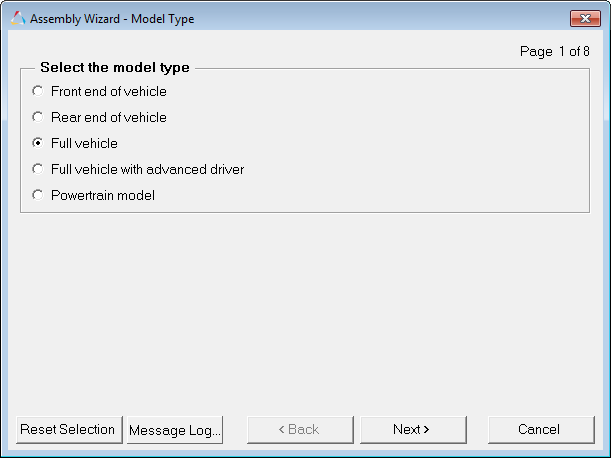
Figure 1.
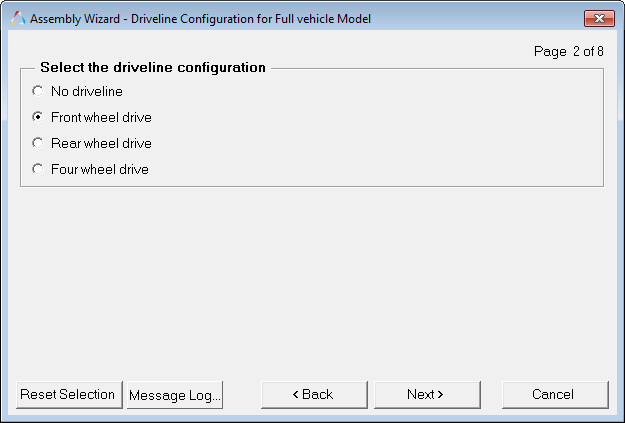
Figure 2. (またはRear wheel driveかFour wheel drive)
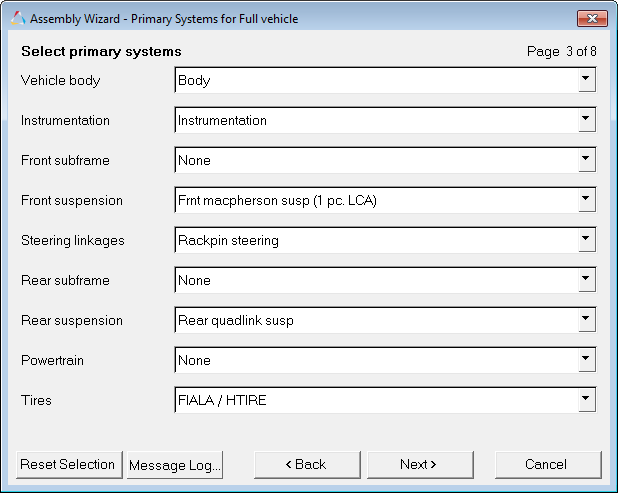
Figure 3.
TiresドロップダウンメニューからFIALAを選択すると、Assembly Wizardの残りの部分の他のすべての選択肢で、フルビークルモデルでのタイヤ利用が有効になります。
この後に、AnalysisメニューでTask Wizardを選択すると、フルビークル用のタスクのみが選択可能になります。
Note: すべてのフルビークル解析でタイヤを使用します。
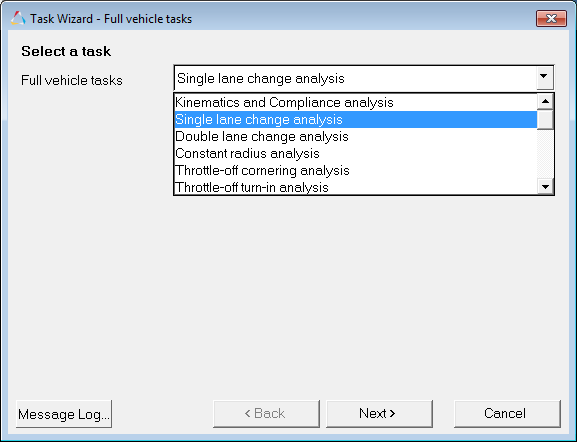
Figure 4.
MotionViewでのフルビークルモデルの例を以下に示します:
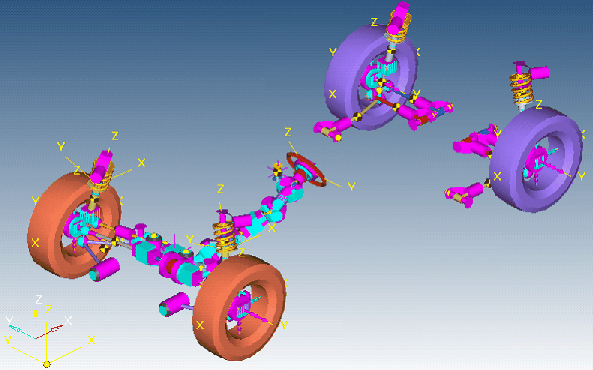
Figure 5.
生成されるモデルには、以下のブラウザ画像で示されているように、タイヤのMDLシステムが含まれます(FIALAシステム):
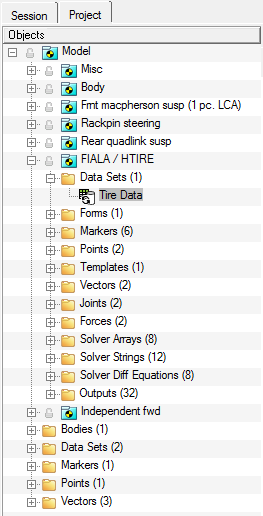
Figure 6.
Figure 6.
Systemパネルには、FIALAタイヤシステムに必要なすべてのアタッチメントが表示されます:

Figure 7.
Figure 7.
6つの主要なアタッチメントを以下に示します:
- Wheel Center (Front & Rear): これは、ホイールの中心位置を定義するために使用されるポイントエンティティです。
- Spindle Alignment Point (Front & Rear): これは、ホイールのスピン軸を定義するために使用されるポイントエンティティです。
- Wheel Body (Front & Rear): これは、タイヤフォースの適用対象となるボディとして使用されるボディエンティティです。
このシステム内には、“Tire Data”というMDLデータセットがあります。これには、タイヤプロパティファイル(.tir)および路面プロパティファイル(.rdf)への参照など、関連するすべてのタイヤデータが含まれています。
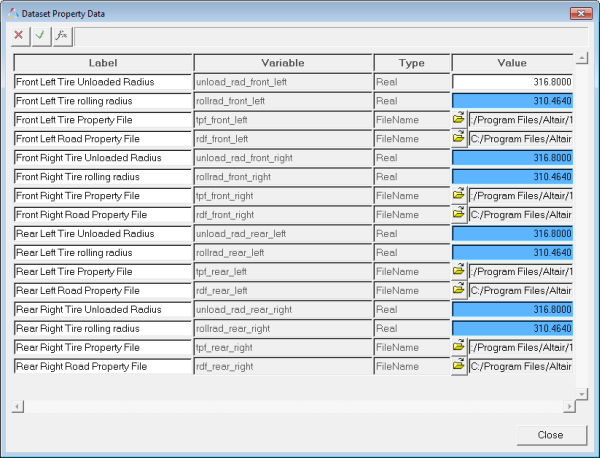
Figure 8.
Note: タイヤごとに、それぞれ独自のタイヤプロパティファイルまたは路面プロパティファイルを使用できます。
Figure 8.
また、無荷重半径を指定する欄もあります(これと同じパラメータがタイヤプロパティファイル内にもあります)。無荷重半径は、ここでは転がり半径を計算するために使用されます(転がり半径は無荷重半径の98%に設定されます)。転がり半径は、地面参照マーカーのZ位置を定義するためにも使用されます。例えば、路面の位置を定義することや、シミュレーションの開始時に必ず路面によってタイヤがわずかに変形するようにすることができます。このテーブルで、無荷重半径の値を、タイヤプロパティファイルで使用される値と整合するよう(等しくなるよう)に保つことが重要です。
ホイールボディのパラメータは、ホイールボディ用のボディパネル(対応するサスペンションシステムのBodiesフォルダーの下)にあります。
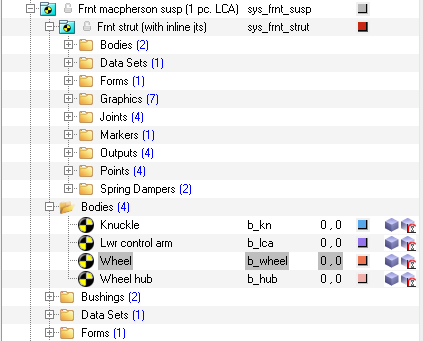
Figure 9.
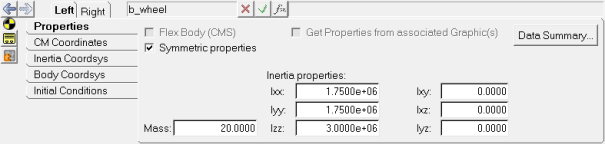
Figure 10.
Figure 9.
Figure 10.