フィードフォワードステアリングコントローラー - 乗用車とトラック
フィードフォワードスロットルコントローラーやブレーキコントローラーと同様に、ステアリングフィードフォワードコントローラーは、先読み時間後または先読み距離後の車両の状態を予測します。予測点と定義された経路を用いて、ステアリング角度を与えることで横方向の誤差の最小化を試みます。
適切なステアリング角度を計算して、先読み時間後または先読み距離後の車両の位置をできるだけセンターライン寄りに誘導します。このコントローラーは、3Dカーブ(X Y Z)またはパラメトリック経路(定常円旋回イベントの円形路までの距離 / 円形路の寸法など)をインスタンス化するための情報を要求します。
タイプ
-
- MOTION CONTROL
- ドライバー出力は、車両に結合されたステアリングホイールの強制角度です。
-
- TORQUE CONTROL
- ドライバー出力は、ハンドルに加えられるステアリングトルクです。
アルゴリズム
運動学二輪モデルまたは動力学二輪モデルに記載されているように、等価二輪モデルを使用して車両状態の導関数を計算します。
その後で、ドライバーが、Newton-Raphson法を使用して、経路の横方向誤差を最小化するステアリングホイール角を計算します。
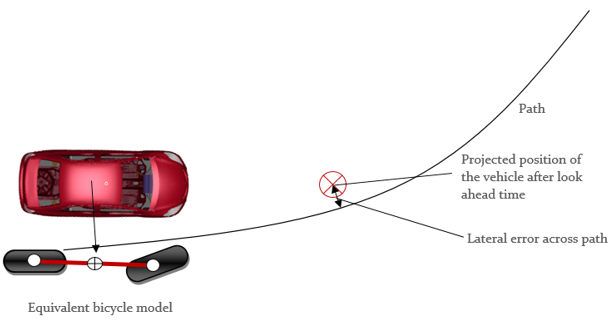
Figure 1.
Figure 1.
DDFを使用して指定される経路: フィードフォワードステアリングは、センターラインに関するファイルを要求します。節点/ポイント(間隔が均等である必要はない)は、表形式のデカルト座標で指定されます。
[FEEDFORWARD_STEERING]
TAG = 'FEEDFORWARD'
LOOK_AHEAD_TIME = 0.5
PATH = 'DDF'
FILE = 'spiral.ddf'
INTEGRATION_STEP_SIZE = 0.01| [FEEDFORWARD STEERING CONTROLLER] | ||
|---|---|---|
| TAG | 属性-文字列 | 必須 <FEEDFORWARD > |
| LOOK_AHEAD_TIME | 属性-実数 | 必須 状態を(現在時刻 + 先読み時間)まで積分して予測します。 |
| INTEGRATION_STEP_SIZE | 属性-実数 | 必須
|
| CONTROL_MODEL | 属性-実数 | オプション
|
| AGGRESSIVE | 属性-ブール | オプション
|
Note:
- 先読み時間が短いほど経路追従は正確になりますが、突然の経路変更により、急激なステアリング入力が発生し、シミュレーションエラーとなる可能性があります。
- 先読み時間が長いほど必要な経路と実際の経路の誤差が大きくなりますが、突然の経路変更が発生してもあまり急激なステアリング入力が発生せず、一般的にはシミュレーションエラーつながることは少なくなります。
- 前方予測距離 = 先読み時間 * 速度。
- 予測アルゴリズムでは内部積分器が使用されるため、積分用のステップサイズが必要です。ステップサイズが小さいほど正確に予測されますが、シミュレーションの計算量が増えます。このステップサイズは、MotionSolveのh_maxとは異なります。
- 適切な精度と計算速度の推奨値は、LOOK_AHEAD_TIME/50です。