Help
パネル領域のHelpボタンを使用すると、AutoTireとそれに関連するパラメータの情報にすばやくアクセスできます。Helpボタンをクリックすると、次のウィンドウが表示されます。
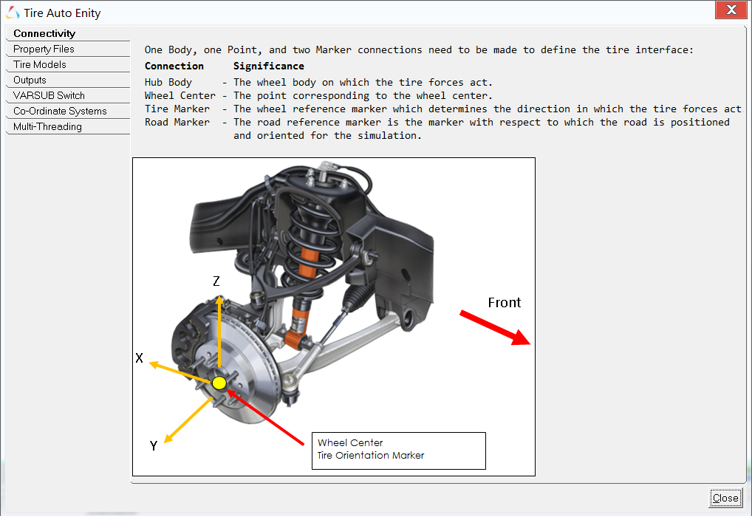
Figure 1.
次のセクションでは、Helpダイアログに用意されている情報のいくつかについて説明します。
タイヤモデル
AutoTireでは、次のタイヤモデルをサポートしています。
- CD Tire
-
ヘルプセクションでの順にご参照ください。
- ライセンス
- ヘルプセクションでの順にご参照ください。
- FIALA
-
ヘルプセクションでの順にご参照ください。
- FTire
-
ヘルプセクションでの順にご参照ください。
- ライセンス
- FTireライセンス要求については、www.cosin.euをご参照ください。
- MF-TIRE/MF-SWIFT
-
ヘルプセクションでの順にご参照ください。
- User Tire
-
ヘルプセクションでの順にご参照ください。
出力
| ラベル | 説明 | 単位 |
|---|---|---|
| Radius | X - タイヤの変形時の半径 | 長さ |
| Y - タイヤの実際の回転速度 | ラジアン / 時間 | |
| Z - 無荷重半径を考慮した回転速度 | ラジアン / 時間 | |
| LonSlip LatSlip IncAngle(ISO) | X – タイヤの縦方向スリップ | % |
| Y – タイヤの横方向スリップ | rad | |
| Z - タイヤの傾斜角 | rad | |
| Tire CP Forces (W軸座標系) |
ISO軸座標系を基準とした、タイヤ接触パッチにおけるタイヤのフォースとモーメント。 | フォース フォース*長さ |
| Tire CP Forces (SAE軸座標系) |
SAE軸座標系を基準とした、タイヤ接触パッチにおけるタイヤのフォースとモーメント。 | フォース フォース*長さ |
| LonSlip LatSlip IncAngle(SAE) | X – タイヤの縦方向スリップ | % |
| Y – タイヤの横方向スリップ | rad | |
| Z - タイヤの傾斜角 | rad | |
| タイヤハブフォース (C軸座標系) |
ISO軸座標系を基準とした、ホイール中心におけるタイヤのフォースとモーメント。 | フォース フォース*長さ |
| Contact Patch Location | 接触パッチ位置のX、Y、Zの各座標 | 長さ |
VARSUBスイッチ
“VARSUBスイッチ”を“オン”にすることによって、タイヤの内部状態にアクセスできます。この内部状態はソルバー変数として用意されています。これらの内部状態にアクセスするには、次のシンタックスを使用します:
AutoTireの場合 - 単一エンティティ:
<autoTire varname>.sys_varsub.<varname of state variable>
AutoTireの場合 - ペアエンティティ:
<autoTire varname>.sys_tire_<side>.sys_varsub.<varname of state variable> Note: ペアの左側に対しては
leftを使用し、ペアエンティティの右側に対してはrightを使用します。VARSUBソルバー変数の説明を以下に示します。
| 変数名 | 説明 |
|---|---|
| sv_long_slip | 縦方向スリップ(%)(ISO座標系) |
| sv_slip_angle | 横方向スリップ(ISO) |
| sv_camber_angle | キャンバー角(ISO) |
| sv_cp_force_x | X方向の接触パッチフォース(W軸座標系) |
| sv_cp_force_y | Y方向の接触パッチフォース(W軸座標系) |
| sv_cp_force_z | Z方向の接触パッチフォース(W軸座標系) |
| sv_cp_moment_x | X方向の接触パッチモーメント(W軸座標系) |
| sv_cp_moment_y | Y方向の接触パッチモーメント(W軸座標系) |
| sv_cp_moment_z | Z方向の接触パッチモーメント(W軸座標系) |
| sv_rim_ang_vel | リムの角速度 |
| sv_rim_long_vel | リムの縦方向速度 |
| sv_rim_vert_vel | リムの横方向速度 |
| sv_roll_rad | 転がり半径 |
| sv_cp_loc_x | X方向の接触パッチ位置(グローバルフレーム) |
| sv_cp_loc_y | Y方向の接触パッチ位置(グローバルフレーム) |
| sv_cp_loc_z | Z方向の接触パッチ位置(グローバルフレーム) |
Note: 出力単位はMDL単位です。
座標系
- Tydex-C Axis座標系
-
“C”はホイールの中心を意味します。C軸座標系には次のような特性があります。
- C軸座標系の原点はホイールの中心です。
- X軸はホイール面内にあり、接地平面と平行で、進行方向を指します。
- Y軸はホイール面と垂直で、車両の左側方向を指します。したがって、ホイールとタイヤのY軸周りの正方向回転は、タイヤを前方に回転させます。
- Z軸はホイール面内にあって、垂直方向に対して傾斜角度ぶんの角度を成し、X軸とY軸に対して垂直です(Z = X x Y)。
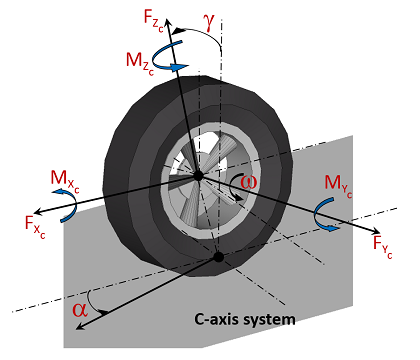
Figure 2. - Tydex-W Axis座標系
- “W”はホイールです。Tydex W軸座標系では、路面が平坦とは仮定せず、タイヤが路面と接触する位置で路面が示す局所的な傾斜が考慮されます。
- W Axis座標系の原点はホイール面と局所路面との理想の接触ポイント上に位置します。これは、Tydex C座標系のZ軸と局所路面との交差点です。
- X軸は、ホイール面と局所路面との交差のライン方向を指します。
- Z軸は局所路面の法線と平行です。すなわち、局所路面と垂直です。
- Y軸は、ホイールの回転軸(Tydex C-Axis座標系のY軸)の局所路面への投影です。Y軸は、X軸とZ軸の両方に垂直です(Y = Z x X)。
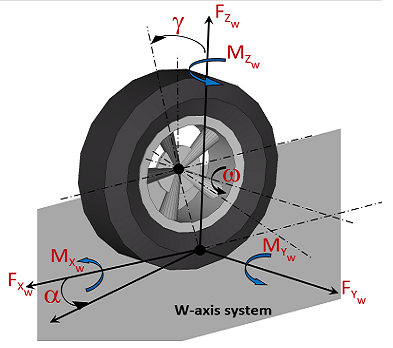
Figure 3. - SAE軸座標系
-
- X軸は前方が正方向です。
- Y軸は右が正方向です。
- Z軸は下が正方向です。
マルチスレッド
| タイヤモデル | マルチスレッド | マルチスレッドの有効化 |
|---|---|---|
| CD Tire | YES |
CDTireの場合、CDTire.iniファイルでマルチスレッドを制御します。マルチスレッドを有効にするには、パラレルブロック内の最大スレッド数を1より大きい数値に設定します。 以下に例を示します。
|
| F Tire | YES | マルチスレッドは環境変数NUSOL_MT_TIREで制御されます。
NUSOL_MT_TIRE= 0(シングルスレッド実行) |
| MF-Tire/MF-SWIFT | NO | 適用外 |
| User Tire | NO | 適用外 |