컨트롤러
피드백 제어 루프룰 통해 원하는 (목표) 값을 시도하고 도달하는 방법으로 컨트롤러가 제공됩니다.
모터와 액추에이터는 기본적으로 컨트롤러를 사용하지만, 마이크로 대화 상자  에 컨트롤러를 비활성화할 수 있도록 하는 옵션이 있습니다.
에 컨트롤러를 비활성화할 수 있도록 하는 옵션이 있습니다.

그림 1. 모터의 컨트롤러 옵션

그림 2. 액추에이터의 컨트롤러 옵션
에 컨트롤러를 비활성화할 수 있도록 하는 옵션이 있습니다.그림 1. 모터의 컨트롤러 옵션
그림 2. 액추에이터의 컨트롤러 옵션
컨트롤러 유형
속성 편집기에서 2가지 유형의 컨트롤러를 사용할 수 있습니다.
- PID
- 가벼운 구속(각도 모터 및 변위 액추에이터에만 사용 가능)
주: 일반적으로 컨트롤러를 사용하도록 권장되지만, 컨트톨러가 원하는 대로 작동하지 않는 경우 컨트롤러를 꺼보십시오. 선택된 프로파일 기능은 피드백 루프가 포함되지 않은 상태로 직접 사용됩니다.
PID 컨트롤러
PID는 전통적인 Proportional-Integral-Derivative(PID) 제어 구조입니다. 컨트롤러가 원하는 방식으로 응답하지 않는 경우, 속성 편집기에서 이득을 조정할 수 있습니다.
- 비례 이득
- 적분 이득
- 파생 이득
가벼운 구속 컨트롤러
소프트 구속은 전통적인 컨트롤러가 아니지만, 약간의 위반이 허용되는 수학적 구속에 더 가깝습니다. (이 때문에 위반이 허용되지 않는 엄격한 구속에 반대되는 의미의 가벼운 구속인 이유입니다.)
속성 편집기에서 인자를 조정해서 가벼운 구속의 작동을 변경할 수 있습니다.
- 비례 인자
- 파생 인자
예
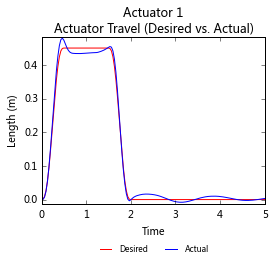
이 플롯은 원하는 단계-드웰-단계 프로파일 기능을 초과하는 가벼운 구속 컨트롤러의 경우를 보여줍니다.