解析エンティティ
解析を定義するために9タイプのモデリング要素コンテナーが使用されています。解析には、1つのサブシステム(駆動トルクコントローラー)も用意されています。
フロントサスペンション解析で13個のモデリング要素タイプが使用され、リアサスペンション解析で14個のモデリング要素が使用されています(以下を参照)。サブシステム“Jack”および“Marker for Request”についても以下に説明があります。
アタッチメント
解析では、標準の解析アタッチメントを使用します。モデルがModel Wizardを介して構築されている場合、アタッチメントは自動的に定義されます。アタッチメントには、解析が解析を実行するために必要な最小限のデータが格納されています。アタッチメントは、大半の解析で標準です。
ボディ
車両前部の静的ライド解析では、JackおよびDummy bodyの2つのボディが使用されています。Jackは、垂直に動いてサスペンションの変位を発生するプラットフォームをシミュレートするために使用します。Dummy bodyは、システムにADAMSモデリングとの互換性を実現できるように解析に用意されています。Dummy bodyは固定ジョイントでナックルに結合されているので、MotionSolveで実行する場合は解析での役割はありません。
リアサスペンションの解析では、特定のサスペンションで自由度を有効にするためにDummy body for DOFボディが用意されています。Dummy bodyは、ソフトブッシュで地面に拘束されます。
ブッシュ
フロントサスペンション解析には、ブッシュはありません。車両後部のサスペンション解析では、“Dummy bush for DOF”という1つのブッシュが用意されています。Dummy bush for DOFは、Dummy Body for DOFボディをソフトブッシュレートで地面に拘束します。ブッシュは、特定のモデルで自由度が正常に機能するために使用されます。
データセット
システムではVehicle ParametersおよびSuspension travelの2つのデータセットが使用されています。Suspension travelデータセットは、ジャウンスおよびリバウンドでサスペンションストロークの入力を保存するために使用します。そのパラメータはSuspension travelフォームで編集します。Vehicle Parametersデータセットを使用して、サスペンション設計係数の計算で使用するデータを保存します。その入力値はVehicle Parametersフォームで編集します。入力値およびそれらの使用法については、サスペンション設計係数をご参照ください。
フォース
車両前部および後部の静的ライド解析には、1つのフォースペアJack Vertical Actuatorが用意されています。このフォースは、サスペンションをジャウンスおよびリバウンドさせる接地力をジャックに適用します。フォースは、DIFステートメントによって制御します。
フォーム
静的ライド解析には、2つのフォームが用意されています。これらのフォームを使用して、解析への入力を変更します。Vehicle Parametersフォームは、サスペンション設計係数の計算で使用する入力の編集に使用します。Static Ride Parametersフォームでは、解析で使用するジャウンスおよびリバウンドのストロークを定義します。サスペンションのホイール中心に必要とする垂直ストロークと一致するように、この値を変更します。フォームは車両前部および後部で同じです。
グラフィックス

Figure 1. ジャッキのグラフィックスの例
Joints
車両前部の静的ライド解析には、“Dummy Fixed to Knuckle”および“Rack Dummy Ball”の2つのジョイントが使用されています。車両後部の静的ライド解析には、“Dummy Fixed to Knuckle”ジョイントが1つ使用されています。“Dummy Fixed to Knuckle”は、ナックルをダミーボディに結合する固定ジョイントです。ダミージョイントは、ダミーボディを拘束するために含まれています。ダミーボディは、特定の解析がADAMSで動作するようにするために使用されます。
マーカー
| マーカーのラベル | マーカーの変数名 | 説明 | 使用法 |
|---|---|---|---|
| Wheel Center | mrk_wc | ダミーボディ上でホイール中心の位置に置いたマーカーペア。そのZ軸は車両内側を指し、ZX面は全体座標系のX軸方向に置かれます。 | ホイール中心の位置に置いた主要なマーカーペアです。サスペンションのモーションを駆動するシステムの中で、SDFサブルーチンのSDFを計算するために使用します。 |
| WC marker at Ground | mrk_gnd | 地面上でホイール中心の位置に置いたマーカーペア。そのZ軸は全体座標系のZ軸方向を指し、そのZX面は全体座標系のX軸の方向に置かれます。 | サスペンションのモーションを駆動するシステムの中で、SDFサブルーチンのSDFを計算するために使用します。 |
| Kingpin Axis Marker | mrk_kp | ナックル上でLBJの位置またはその推定位置に置いたマーカーペア。Z軸は実際のUBJ位置またはその推定位置の方向を指します。 | ユーザー出力リクエストとSDFサブルーチンの両方で、車両キングピンメトリックを計算するために使用されます。マーカーのZ軸は計算のために使用されます。 |
| Wheel Patch Marker | mrk_patch | ホイール上でタイヤのパッチ位置に置いたマーカーペア。タイヤパッチ位置はVehicle Parametersフォーム上に入力されたSLRを使用して計算され、“Jack GeomU”ポイントになります。マーカーのZ軸は全体座標系Zに沿い、マーカーのX軸は全体座標系ZX面上に存在します。 | ユーザー定義式出力でRoll Angle/Track Widthを計算するために使用します。 |
| Ground Patch Marker | mrk_patch_grnd | ボディ“ground”上でタイヤのパッチ位置に置いたマーカーペア。タイヤパッチ位置はVehicle Parametersフォーム上に入力されたSLRを使用して計算され、“Jack GeomU”ポイントになります。マーカーのZ軸は全体座標系Y(横方向)軸に沿い、マーカーのX軸は全体座標系X面上に存在します。 | MotionSolve解析では現在使用されていません。 |
| マーカーのラベル | マーカーの変数名 | 説明 | 使用法 |
|---|---|---|---|
| Wheel Center Marker | mrk_wc | ダミーボディ上でホイール中心の位置に置いたマーカーペア。そのZ軸は車両内側を指し、ZX面は全体座標系のX軸方向に置かれます。 | ホイール中心の位置に置いた主要なマーカーペアです。サスペンションのモーションを駆動するシステムの中で、SDFサブルーチンのSDFを計算するために使用します。 |
| WC marker at Ground | mrk_gnd | 地面上でホイール中心の位置に置いたマーカーペア。そのZ軸は全体座標系のZ軸方向を指し、そのZX面は全体座標系のX軸の方向に置かれます。 | サスペンションのモーションを駆動するシステムの中で、SDFサブルーチンのSDFを計算するために使用します。 |
| Ground Reference at Contact Patch | Tcp_grnd | ボディ“ground”上でJack Geomuポイント(タイヤパッチ)の位置に置いたマーカーペア。マーカーのZ軸は全体座標系Zに沿い、マーカーのXZ面は全体座標系X軸に沿います。 | このマーカーはMotionSolve解析では使用されません。 |
| Ground Reference at wc | wc_grnd | 地面上でホイール中心の位置に置いたマーカーペア。マーカーのZ軸は全体座標系Zに沿い、マーカーのX軸は全体座標系ZX面上に存在します。 | このマーカーはMotionSolve解析では現在使用されていません。 |
| Kingpin Axis Marker | mrk_kp | ナックル上でLower Ball Jointの位置またはその推定位置に置いたマーカーペア。Z軸は実際のUpper Ball Joint位置またはその推定位置の方向を指します。ストラットタイプのサスペンションでは、マーカーのZ軸はストラットの上部を指します。 | ユーザー出力リクエストとSDFサブルーチンの両方で、車両キングピンメトリックを計算するために使用されます。マーカーのZ軸は計算のために使用されます。 |
| Wheel Patch Marker | mrk_patch | ボディ“ground”上でJack Geomuポイント(タイヤパッチ)の位置に置いたマーカーペア。マーカーのZ軸は全体座標系Z(横方向)軸に沿い、マーカーのZX面軸は全体座標系X面上に存在します。 | MotionSolve解析では現在使用されていません。 |
モーション
車両前部の静的ライド解析には2つのモーションが含まれ、車両後部の静的ライド解析には1つのモーションが含まれます。ホイールスピンドルのモーションは車両前部および後部両方の解析で使用し、ハンドルのモーションは車両前部の解析で使用します。ホイールスピンドルのモーションは、ホイールの回転を防止するためにホイールをナックルに固定します。ハンドルのモーションは、ほとんどの解析でハンドルを固定するために使用するほか、ステアリング解析ではハンドルを回すために使用します。車両前部および後部のライド解析の両方で、ホイールスピンドルのモーションは非アクティブにして使用しません。
出力
車両前部および後部の静的ライド解析の両方に45個の出力が用意されています。
ポイント
| ポイント | 説明 | 使用法 |
|---|---|---|
| Jack GeomL (ジャックの上部形状) |
Jack GeomUポイントより320mm下のポイント。 | ジャック形状の定義に使用します。320mmは任意の数字です。 |
| Jack GeomU (ジャックの下部形状) |
タイヤパッチ位置の推定値。Vehicle Parametersフォームに入力したホイール中心位置、スピンドル軸、およびSLRを使用して計算されます。 | SDFの計算で、テスト装置のプラテンからホイールに荷重が転送される位置として使用します。 |
Solver Arrays
| Vehicle Parameter Array | 説明 | 使用法 |
|---|---|---|
| Ds_vehpar.veh_end.ival | 車両エンド: 1=フロントサスペンション 2=リアサスペンション 3=2番目のリアサスペンション |
サスペンションのタイプをSDFサブルーチンに伝達します。サブルーチンは、車両のどのエンドが解析されるかに応じて、特定のパラメータに対して異なる値を計算します。 |
| Ds_vehpar.dif_mnt.ival | マウントタイプの区分 0=ボディにマウント 1=ばね下マウント(軸と一体化) |
アンチリフトおよびアンチダイブ計算において、SDF計算に使用されます。 |
| Ds_vehpar.tire_slr.value | タイヤの静的荷重半径(mm) | Jack GeomUポイントを見つけるために、SDF計算の多くで使用します。 |
| Ds_vehpar.tire_rate.value | タイヤのスプリングレート(N/mm) | SDF計算で使用されます。 |
| Ds_vehpar.cg_height.value | 車両重心の高さ。地面からZ方向のCGまでが計測されます(mm)。 | SDF計算(特にアンチリフトおよびアンチダイブ計算)に使用されます。 |
| Ds_vehpar.wheel_base.value | 車両の軸間距離(mm) | SDF計算(特にアンチリフトおよびアンチダイブ計算)に使用されます。 |
| Ds_vehpar.front_brake.value | 合計ブレーキトルクに対する前部ブレーキトルクの比率(通常0.6~0.7)。 | SDF計算(特にアンチリフトおよびアンチダイブ計算)に使用されます。 |
| Ds_vehpar.front_drive.value | フロントアクスルに適用されるエンジントルクを合計トルクで除算した比率。 | SDF計算(特にアンチリフトおよびアンチダイブ計算)に使用されます。 |
| Ds_vehpar.axle_ratio | 解析中のサスペンションの公称軸比。通常2.7~5.0の範囲です。 | SDF計算(特にアンチリフトおよびアンチダイブ計算)に使用されます。 |
| Ds_vehpar.veh_weight.value | 車両総質量(Kg) | SDF計算および車両フォース解析イベントに使用されます。 |
| パラメータ名 | 説明 | 使用法 |
|---|---|---|
| mrk_wc.l.id | 左のホイール中心に置いた左ホイール中心マーカーのマーカーID。そのZ軸はスピンドル軸と平行に車両内側を指し、ZX面は全体座標系のX軸方向に置かれます。その結果、マーカーのY軸は下方を指します。 | 左サスペンションのSDF計算の主要なポイント位置です。ほとんどの形状プロパティおよびほとんどのコンプライアントSDFパラメータは、このポイントを入力として使用して計算されます。 |
| mrk_wc.r.id | 右のホイール中心に置いた右ホイール中心マーカーのマーカーID。そのZ軸はスピンドル軸と平行に車両内側を指し、ZX面は全体座標系のX軸方向に置かれます。その結果、マーカーのY軸は上方を指します。 | 右サスペンションのSDF計算の主要なポイント位置です。ほとんどの形状プロパティおよびほとんどのコンプライアントSDFパラメータは、このポイントを入力として使用して計算されます。 |
| mrk_kp.l.id | 左下のボールジョイント位置または左のキングピン軸上のポイントを定義する位置に置いた左キングピン軸マーカーID。このマーカーのZ軸は、左上のボールジョイントの方向またはキングピン軸上のポイントを定義するポイントの方向を指します。 | このマーカーのZ軸を使用して、車両左側のキャスターおよびキングピンの傾斜を計算します。 |
| mrk_kp.r.id | 右下のボールジョイント位置または右のキングピン軸上のポイントを定義する位置に置いた右キングピン軸マーカーID。このマーカーのZ軸は、右上のボールジョイントの方向またはキングピン軸上のポイントを定義するポイントの方向を指します。 |
このマーカーのZ軸を使用して、車両右側のキャスターおよびキングピンの傾斜を計算します。 |
| mrk_gnd.l.id | ボディ“ground”上の左ホイール中心マーカーのID。このマーカーは、グラウンドボディ上で左ホイール中心の位置にあります。このマーカーのZ軸は全体座標系のZ軸に平行で、X軸は全体座標系のX軸に平行です。 | このマーカーは、左のホイール変位制御システムと、SDFルーチンで左ホイール中心の変位の計算に使用します。 |
| mrk_gnd.r.id | ボディ“ground”上の右ホイール中心マーカーのID。このマーカーは、グラウンドボディ上で右ホイール中心の位置にあります。このマーカーのZ軸は全体座標系のZ軸に平行で、X軸は全体座標系のX軸に平行です。 |
このマーカーは、右のホイール変位制御システムと、SDFルーチンで右ホイール中心の変位の計算に使用します。 |
| sfo_jack_actuator.l.i.id | ジャッキと地面の間の左側フォースのIマーカーID。このフォースは、左ホイールサスペンションのモーションを駆動するために使用します。 | フォースは、SDFサブルーチンの計算およびSDFルーチンによってレポートされるフォースに使用されます。IマーカーIDおよびJマーカーIDは、正しいフォースを復元するために必要です。 |
| sfo_jack_actualtor.r.i.id | ジャッキと地面の間の左側フォースのJマーカーID。このフォースは、左ホイールサスペンションのモーションを駆動するために使用します。 | フォースは、SDFサブルーチンの計算およびSDFルーチンによってレポートされるフォースに使用されます。IマーカーIDおよびJマーカーIDは、正しいフォースを復元するために必要です。 |
| sfo_jack_actuator.j.i.id | ジャッキと地面の間の右側フォースのIマーカーID。このフォースは、右ホイールサスペンションのモーションを駆動するために使用します。 | フォースは、SDFサブルーチンの計算およびSDFルーチンによってレポートされるフォースに使用されます。IマーカーIDおよびJマーカーIDは、正しいフォースを復元するために必要です。 |
| sfo_jack_actualtor.j.i.id | ジャッキと地面の間の右側フォースのJマーカーID。このフォースは、右ホイールサスペンションのモーションを駆動するために使用します。 | フォースは、SDFサブルーチンの計算およびSDFルーチンによってレポートされるフォースに使用されます。IマーカーIDおよびJマーカーIDは、正しいフォースを復元するために必要です。 |
| b_str_dummy.cm.id | ステアリングダミーボディの質量中心ID番号。ステアリングラックに結合されたダミーボディの質量中心マーカーです。 | 現在のサブルーチンでは使用されませんが、ADAMSシミュレーションとの互換性を維持するためにソフトウェアに保持されています。 |
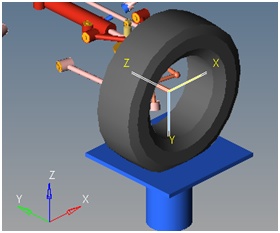 Figure 2. |
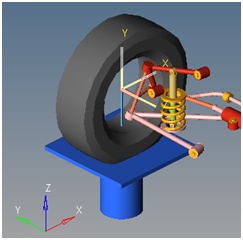 Figure 3. |
Solver Differential Equations
車両前部および後部の静的ライド解析には、Differential left jackおよびDifferential right jackの2つのソルバー微分方程式があります。ソルバー微分方程式は、要求されたストロークでサスペンションを駆動するために使用する制御システムの一部です。フロントサスペンションとリアサスペンションで、互いに類似の方程式を使用します。
IF(mode-4:0,0,1)*IF(mode-7:1,0,0)*(VARVAL(31000200)-VARVAL(31000100))この方程式を分解すると次のようになります。
IF(mode-4:0,0,1)- mode(ソルバーの解析タイプ)が4以下の場合、この式はゼロとして評価されます。modeが4より大きい場合、この式は1として評価されます。
IF(mode-7:1,0,0)- mode(ソルバーの解析タイプ)が7以下の場合、この式は1として評価されます。modeが7より大きい場合、この式はゼロとして評価されます。
VARVAL(31000200)- 左ホイール中心に対してコマンドで適用するZ方向変位を表すソルバー変数値。
VARVAL(31000100)- 設計位置から全体座標系のZ方向へ左ホイール中心に発生した実際の変位を表すソルバー変数値。
IF(mode-4:0,0,1)*IF(mode-7:1,0,0)- modeが5および6の場合、この式は1になります。これは静解析および擬似静解析です。その他のすべてのMODEの場合ゼロに評価されます。これにより、静解析および擬似静解析以外の解析シーケンスで、ソルバー微分方程式が事実上オフになります。
VARVAL(31000200)-VARVAL(31000100))- コマンドによる変位マイナス実際の変位。サスペンションがコマンドによる値に追従する場合、これはゼロになります。
ソルバー微分方程式では、それに続くソルバー微分方程式のプロパティにより、ホイールの変位が維持されます。その結果、静解析および擬似静解析では、動的状態の導関数がゼロに設定されます。これは、これら2つの解析でControl_Diffを代数式に変換します。詳細については、MotionSolveリファレンスガイドのControl Diffのトピックをご参照ください。
ソルバー変数
- 変数名
- 説明
- Left feedback variable
- 全体座標系で、左ホイール中心の元の位置を基準として、左ホイール中心マーカーに全体座標系のZ軸方向に発生した相対的な変位。
- Left command variable
- 左ホイール中心に要求した変位。0~5秒の間は、static ride parametersフォームで定義したジャウンスストロークに等しい大きさを持つ半波正弦関数。5~10秒の間は、static ride parametersフォームで定義したリバウンドストロークに等しい大きさを持つ半波正弦関数。
- Right feedback variable
- 全体座標系で、右ホイール中心の元の位置を基準として、右ホイール中心マーカーに全体座標系のZ軸方向に発生した相対的な変位。
- Right command variable
- 右ホイール中心に要求した変位。0~5秒の間は、static ride parametersフォームで定義したジャウンスストロークに等しい大きさを持つ半波正弦関数。5~10秒の間は、static ride parametersフォームで定義したリバウンドストロークに等しい大きさを持つ半波正弦関数。
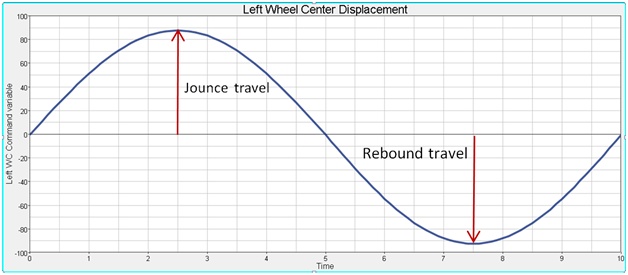
Figure 4.
Wheel Displacement Control System
車両半分の解析の多くでは、ホイールをジャウンスやリバウンドへ変位させるために制御システムを使用します。システムは、Jackにフォースを適用して、“Left Command variable”および“Right Command variable”によって定義された変位だけホイールの中心を移動させます。制御システムは、静解析および擬似静解析ソリューションの実行中にのみ動作します。
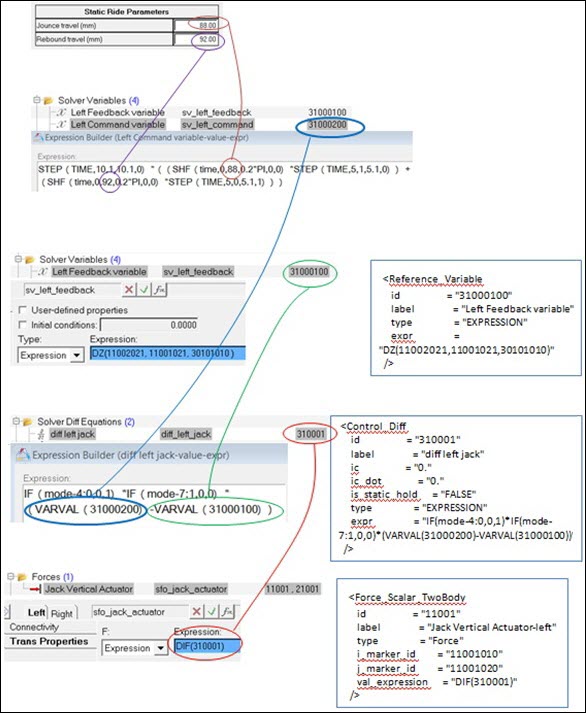
Figure 5.
- ジャウンスのストロークとリバウンドのストロークが、“Static Ride Parameters”フォームに入力されます。ストロークは、対称的であると見なされます。
- ソルバー変数“Left Command variable”(図に表示)および“Right Command variable”(図には非表示)は、“Static Ride Parameters”フォームのストロークを参照します。
- “Left Command variable”と“Right Command variable”の方程式は、2.5秒で正のピーク(ジャウンスストロークに等しい大きさ)に達し、7.5秒で負のピーク(“リバウンドストローク”の大きさ)に達する正弦波を作成します。ソルバー方程式については、下記のソルバー変数セクションで詳しく説明します。
- ソルバー変数“Left Feedback variable”および“Right Feedback variable”が定義されています。変数は、元のホイール中心位置に相対する、全体座標系Z方向のホイール上のホイール中心の変位です。
- ソルバー微分方程式がコマンド変数と実際の変数との差となるように左側と右側に対して定義されています。ホイール中心の変位がコマンド変数に追従すると、微分方程式はゼロになります。“静解析”および“擬似静解析”以外のソリューションでe=sequencesとした場合は、IFステートメントおよびMODE変数を使用して微分方程式はゼロに設定されます。
- フォースは、ホイールのControl Differentialに等しくなるよう定義されています。
- ソルバー微分方程式では、それに続くソルバー微分方程式のプロパティにより、ホイールの変位が維持されます。その結果、静解析および擬似静解析では、動的状態の導関数がゼロに設定されます。これは、これら2つの解析でControl_Diffを代数式に変換します。”
フォームとデータセットの要素
ホイール制御システムのフォームを次に示します。“Static Ride Parameters”フォームには、サスペンションシステムに適用されるジャウンスおよびリバウンドのストロークが含まれます。ストロークは対称的です(L<->R)。ジャウンスとリバウンドの変数は、“Suspension Travel”データセットで定義されます。データセットのタイプおよび変数名はデータセット内で定義されます。データは通常フォームに入力されます。
ソルバー変数
- 式
- 説明
- STEP(TIME,10,1,10.1,0)
- Timeが10より小さい場合に1で、Timeが10より大きい場合にゼロであるステップ関数。
これにより、T=10である場合に式全体がゼロに評価されます。
- SHF(time,0,88,0.2*PI,0,0)
- 時間ベースで時間オフセット0、大きさ88、周波数=.2*pi、位相差0、および平均値0の単調和関数。
- STEP(TIME,5,1,5.1,0)
- Timeが5より小さい場合に1で、Timeが5.1より大きい場合にゼロであるステップ関数。
これは、T>5.1の場合にJounce SHFをオフにします。
- SHF(TIME,0,92,0.2*pi,0,0)
- 時間ベースで時間オフセット0、大きさ92、周波数=.2*pi、位相差0、および平均値0の単調和関数。
- STEP(TIME,5,0,5.1,1)
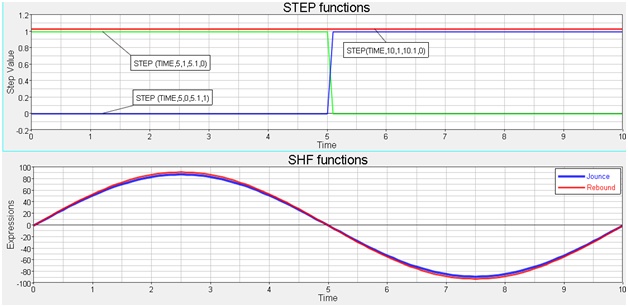
Figure 6. ソルバー変数Command変数のステップ関数およびSHF関数
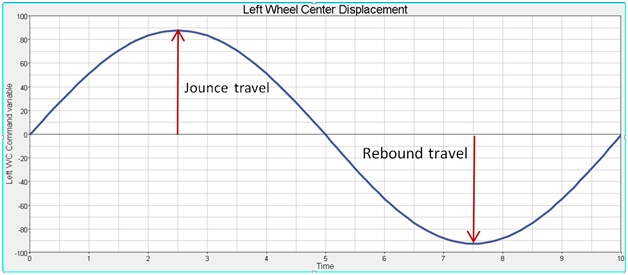
Figure 7. 時間に対する“Left Command variable”の変化の結果
ソルバーフィードバック変数
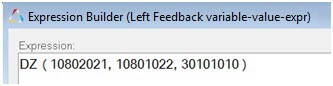
Figure 8.

Figure 9.
| マーカー番号 | マーカーの記号 | 説明 |
|---|---|---|
| 10802021 | Mrk_wc.l.idstring | ホイール上のホイール中心位置のマーカー。 |
| 10801022 | Mrk_gnd.l.idstring | 地面上のホイール中心位置のマーカー。 |
| 30101010 | MODEL.Global_Frame.idstring | 地面上の全体座標系原点のマーカー。その方向は、全体座標フレームと同じです。 |
Solver Differential Equations

Figure 10.

Figure 11.
式の評価
上記の式ではMotionSolveのmode関数とif関数を、VARVAL関数と共に使用しています。2つのIFステートメントの組み合わせにより、静解析および擬似静解析以外のすべてのモードでDIFをゼロにするロジックが作成されます。次に展開する真理値表に、ロジックを示します。
| Mode | Modeの値 | Mode-4 | IF(mode-4:0,0,1) | Mode-7 | IF(mode-7:1,0,0) | IF(mode-4:0,0,1) *IF(mode-7:1,0,0) |
|---|---|---|---|---|---|---|
| Kinematics(キネマティック) | 1 | -3 | 0 | -6 | 1 | 0 |
| Reserved(予約済み) | 2 | -2 | 0 | -5 | 1 | 0 |
| Initial Conditions(初期条件) | 3 | -1 | 0 | -4 | 1 | 0 |
| Dynamics(動解析) | 4 | 0 | 0 | -3 | 1 | 0 |
| Statics(静解析) | 5 | 1 | 1 | -2 | 1 | 1 |
| Quasi Statics(擬似静解析) | 6 | 2 | 1 | -1 | 1 | 1 |
| Linear Analysis(線形解析) | 7 | 3 | 1 | 0 | 0 | 0 |
Actuator Force
アクチュエータフォースのペアは、左右に対して同じように動作します。フォースはジャッキに作用し、地面に反作用します。フォースは垂直方向に作用します。フォースはDIF(308001)の大きさに設定されています。DIFが静解析および擬似静解析時に評価される場合、ソルバー微分方程式の導関数はゼロに設定されます。その結果、測定したホイール変位が、コマンドによるホイール変位に追従するように強制するフォースがDIFによって生成されます。
- 左右ホイールの中心に対して規定するZ方向ホイール変位は、ソルバー変数“Left Command variable”および“Right Command variable”によって定義されます。
- ホイール変位を維持するために必要なフォースは、フォースペア“Jack vertical Actuator”によって定義され、車両の各側の“Jack”ボディ上で純粋なZフォースとなります。これはDIF値に等しく設定されます。
- Z方向の実際のホイール変位は、ソルバー変数“Left Feedback variable”および“Right Feedback variable”によって定義されます。
- 制御量は、ソルバー微分方程式のdiff left jackとdiff right jackで定義します。これらの量は、Commandソルバー変数からFeedbackソルバー変数を減算した値です。これは、ホイールがCommand入力に追従する場合はゼロに等しくなります。
- 静解析および擬似静解析モードでは、ソルバー微分方程式は代数式として扱われます。結果として、DIF値はコマンドのホイール位置を維持するために必要なフォースとなります。
Jack System
- ジャッキシステムのジョイント
- ジャッキシステムには2つのジョイントペアがあります。最初のジョイントは“Jack Trans jt”で、ジャッキボディの下端で並進ジョイントを使用してジャッキボディを地面に結合します。ジョイントはZ(垂直)方向に方向付けられます。ジョイントは、ジャッキが垂直方向にのみ動作するよう強制します。
- ジャッキシステムのベクトル
- 全体座標系X、Y、Z軸に沿って3つのベクトルが定義されており、モデルの特定のジョイントを方向付けるために使用されます。
Marker for the Request System
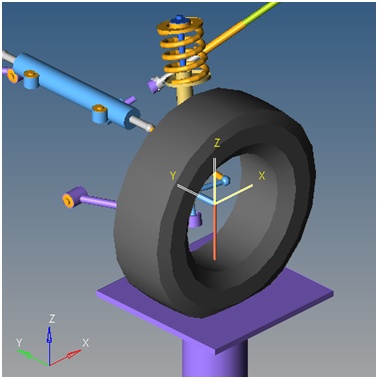
Figure 12. 左ホイール中心のマーカー