開ループコントローラー - Expression
Driver信号に式を割り当てます。この式のシンタックスは、MotionSolveと一致している必要があります。この式は、実行されているMotionViewベースの開ループ信号と同様です。Driverは、ブロック内で指定されている信号チャンネルに付加されたMotionView信号に式を割り当てます。続いてDriverは、信号の変数値を用いて信号を作成します。
[OPEN_LOOP_EXPRESSION]
TAG = 'OPENLOOP'
TYPE = 'EXPRESSION'
SIGNAL_CHANNEL = 0
EXPRESSION = '5*SIN(TIME)'| [OPENLOOPCONTROLLER - EXPRESSION] | ||
|---|---|---|
| TAG | 属性-文字列 | 必須 <OPENLOOP> |
| TYPE | 属性-文字列 | 必須 <EXPRESSION> |
| SIGNAL_CHANNEL | 属性-整数 | 必須 <0 ~ 4>
|
| EXPRESSION | 属性-文字列 | 必須 式は、MotionSolve式のステートメントと一致しなくてはなりません。 |
パラメトリックな式
複数の運転操作イベントでは、信号の連続性を保つために、運転操作の開始に先駆けて、式を再評価する必要がある
例:
スロットルオフでのコーナリングのイベント
-
- 運転操作1
- 定常円旋回、ロール角が最大値に達して安定するまで、一定速度で一定半径の経路を追従
- 運転操作2
- 同じ経路を追従している間にスロットルをステップダウン
このイベントでは、運転操作1は閉ループのステアリングとスロットルコントローラーで構成されます。運転操作 2では、ステアリングコントローラーは同じに留まりますが、スロットルコントローラーは開ループで、式 –‘STEP(TIME – end time of maneuver 1 , 0, throttle value at the end of maneuver 1, 0.5, 0)’を入力します。
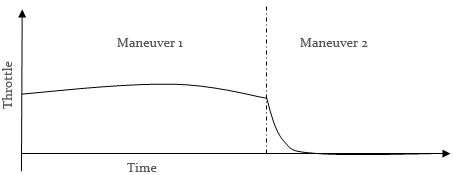
Figure 1.
Figure 1.
- 中括弧{ } – 操縦操作の開始時にDriverが式を再評価することを意味します
- {SIGNAL} はVARVAL(信号ソルバー変数ID)として評価されます
- {SIGNAL_0} は最後の運転操作の終了時における信号値として評価されます。
- {%SIGNAL} は {SIGNAL} – {SIGNAL_0} として評価される
- SIGNALは、予め定義されたキーワードまたはユーザー定義のキーワードのいずれかが可能です。ユーザー定義のキーワードの場合、ユーザーは、MotionViewインターフェース内でキーワードを明示的に定義する必要があります。
予め定義されたキーワードのリスト:
| KEY | 信号 |
| TIME | 時間 |
| DIS | 移動距離 |
| LONG_VEL | 縦方向の速度 |
| LONG_ACC | 縦方向の加速度 |
| LAT_VEL | 横方向の速度 |
| LAT_ACC | 横方向の加速度 |
| ROLL_ANGLE | 回転角 |
| YAW_ANGLE | ヨー角 |
| PITCH_ANGLE | ピッチ角 |
| ROLL_RATE | ロールレート |
| YAW_RATE | ヨーレート |
| PITCH_RATE | ピッチレート |
| CG_X | 車両重心のX変位 |
| CG_Y | 車両重心のY変位 |
| CG_Z | 車両重心のZ変位 |
| ENG_SPD | エンジン回転数 |
| STEER | ステアリング角 |
| THROTTLE | スロットル信号 |
| BRAKE | ブレーキ信号 |
| CLUTCH | クラッチ信号 |
| GEAR | ギア信号 |