AutoBumpStop
AutoBumpStopエンティティは、バンプ(ジャウンスとも呼びます)でのサスペンションのストロークを制限します。2つのボディ間の距離が近くなると、AutoBumpStopによってこれらのボディを引き離す力が作用します。
$(ALTAIR_HOME)\hw\mdl\autoentities\properties\Bumpers-Jounce
AutoBumpStopフォース
- 弾性力または剛性
- 粘性力または減衰
線形AutoBumpStopの場合は、3次多項式を使用して弾性力成分を計算し、非線形AutoBumpStopの場合は、Akima法を使用して弾性力成分を補間計算します。
粘性力成分がプロパティファイルに定義されている場合は、プロパティファイル内の減衰率と2つのボディ間の瞬間速度から粘性力成分が直接計算されます。
Install Methods
AutoBumpStopのinstall methodは、設計位置においてAutoBumpStopフォースが作用し始める距離を決定するために使用します。
- Impact Length手法
- Impact Lengthの値が‘L’の場合、AutoBumpStopフォースは2つのボディ間の距離が‘L’未満になると作用します。
- Impact Lengthを使用している場合は、その値を直接使用して、2つのボディ間のAutoBumpStopフォースがアクティブになります。
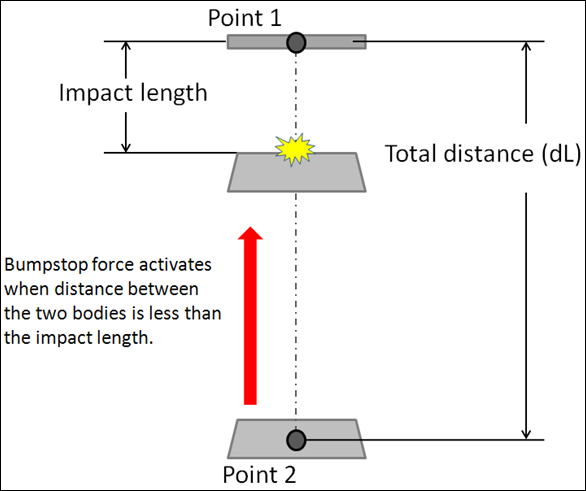
Figure 1. - Clearance手法
- Clearance手法を使用する場合、影響距離は次を使用して計算されます:
- ここで、
(2) 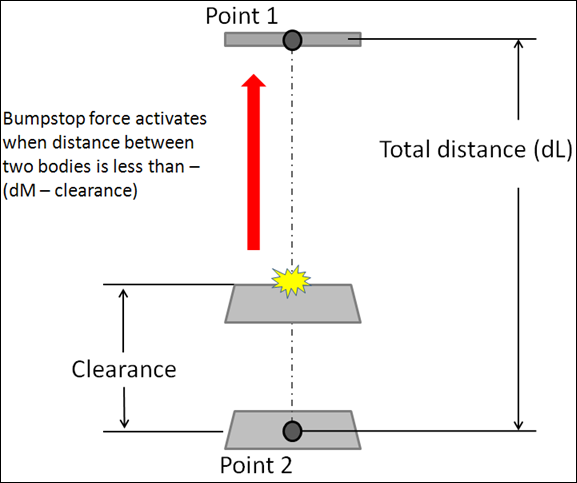
Figure 2.
AutoBumpStopの結合
結合は、BumpStopのフォースが作用する2つのボディと、影響距離の計算に使用する2つのポイントを定義します。ボディ間の距離が指定した長さ未満になると、BumpStopのフォースがアクティブになります。この距離は、選択した設置手法に基づいて計算されます。
AutoBumpStopの出力チャンネル
Outputチェックボックスを選択すると、BumpStopの結果変位、結果速度、および結果フォースの出力リクエストが追加されます。結果変位と結果速度はPoint 1とPoint 2の間で測定され、結果フォースはBody 1とBody 2の間で測定されます。
| タイプ | 成分 | 量 |
|---|---|---|
| REQSUB | RESULT(2) | AutoBumpStop上のPoint 1とPoint 2の間の距離 |
| RESULT(3) | Point 1とPoint 2の間の変位の変化率 | |
| RESULT(4) | AutoBumpStopのフォース | |
| RESULT(6) | 全体座標系によるAutoBumpStopのX方向余弦 | |
| RESULT(7) | 全体座標系によるAutoBumpStopのY方向余弦 | |
| RESULT(8) | 全体座標系によるAutoBumpStopのZ方向余弦 |
AutoBumpStopプロパティファイルの例
AutoBumpStopプロパティは、テキストファイルAutoBumpStopプロパティファイルの例に保存されます。プロパティファイルの欄をAutoBumpStopプロパティファイルとして、モデルをソルバーに送信すると、シミュレーションに使用するAutoBumpStopプロパティファイルがソルバーによって読み取られます。プロパティファイルの単位がモデルの単位と異なる場合、ソルバーによってAutoBumpStopプロパティが内部的にモデルの単位に変換されます。プロパティファイルは変更されません。
AutoBumpStopプロパティファイルには、ヘッダー、単位、およびカーブのブロックが記述されています。単位ブロックは、ファイルで使用される長さ、質量、フォース、時間、角度の単位を指定します。カーブブロックは、弾性力成分のフォース値に対する変位および粘性力成分のフォース値に対する速度(オプション)の表を保持します。
$--------------------------------------------------------------------HEADER
[HEADER]
FILE_TYPE = 'bum'
FILE_VERSION = 4.0
FILE_FORMAT = 'ASCII'$
---------------------------------------------------------------------UNITS
[UNITS]
LENGTH = 'mm'
ANGLE = 'degrees'
FORCE = 'newton'
MASS = 'kg'
TIME = 'second'
$---------------------------------------------------------------------CURVE
[CURVE]
{ disp force}
0.0 0.0
2.0 1.0
4.0 2.0
6.0 3.0
8.0 4.0
10.0 5.0
20.0 6.0
30.0 7.0
40.0 8.0
50.0 9.0