Driverグラフィカルユーザーインターフェース
-
Altair Driver Analysisをクリックして、Altairドライバーグラフィカルユーザーインターフェースを起動します。
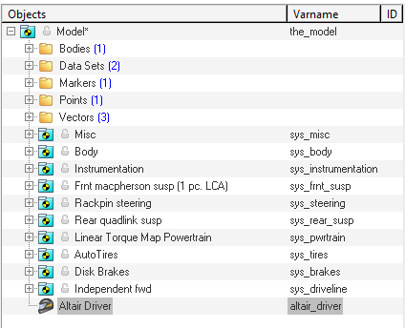
Figure 1.対応するパネルが表示されます。
Figure 2. -
ADFで経路プロファイルや速度プロファイルなどとして使用できるMotionView信号をUser
Signalsタブで定義します。
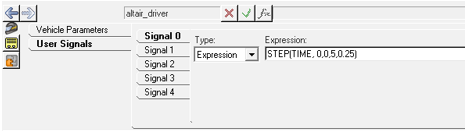
Figure 3. -
AttachmentsボタンをクリックしてAltair Driver Attachmentsダイアログを開きます。
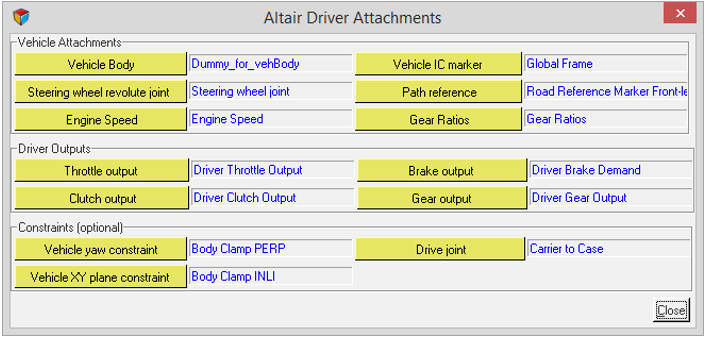
Figure 4.アタッチメント Vehicle Body *必須
車両の速度、加速度、および位置の計算対象とする車体。 Vehicle IC marker *必須
Altair Driver ファイルで初速度を指定する際に基準にするマーカー。 Steering wheel revolute joint *必須
静的シミュレーションでジョイントをロックし、ステアコントローラー出力に対するモーション / トルクを定義するために使用する、車両のステアジョイント。 Path reference *必須
ユーザー定義経路(もしあれば)を設定する際に基準にするマーカー。 Engine Speed *必須(ICエンジンパワートレイン)
エンジン回転数を指定する、パワートレインシステムのソルバー変数。 モデルでICエンジンを選択している場合にのみ表示されます。
線形トルクマップパワートレインの場合に、パワートレインシステムのダミー変数で解析されます。
Gear Ratios *必須(ICエンジンパワートレイン)
ギアボックス(もしあれば)のギア比をドライバーに伝えるカーブ。 モデルでICエンジンを選択している場合にのみ表示されます。
線形トルクマップパワートレインの場合に、パワートレインシステムのダミー変数で解析されます。X(ギア) Y(比) 0 0.00(0速のギアは無視されます) 1 4.7 2 3 Throttle output *必須
スロットル出力を生成するためにAltair Driverで使用する、車両モデルのソルバー変数。 Brake output *必須
ブレーキ出力を生成するためにAltair Driverで使用する、車両モデルのソルバー変数。 Clutch output *必須(ICエンジンパワートレイン)
クラッチ出力を生成するためにAltair Driverで使用する、車両モデルのソルバー変数。 モデルでICエンジンを選択している場合にのみ表示されます。
線形トルクマップパワートレインの場合に、パワートレインシステムのダミー変数で解析されます。
不要な場合は、使用されていない任意のソルバー変数に解析されます。
Gear output *必須(ICエンジンパワートレイン)
ギア出力を生成するためにAltair Driverで使用する、車両モデルのソルバー変数。 モデルでICエンジンを選択している場合にのみ表示されます。
線形トルクマップパワートレインの場合に、パワートレインシステムのダミー変数で解析されます。
不要な場合は、使用されていない任意のソルバー変数に解析されます。
Vehicle yaw constraint *オプション
車体とグラウンドボディの間の垂直軸ジョイント。 静的シミュレーションの解析で、車両のヨー動作を拘束するために使用します。
この拘束は、静的シミュレーションの解析終了後に解除されます。
Vehicle XY plane constraint *オプション
車体とグラウンドボディの間のインラインジョイント。グラウンドとボディ両方のz軸に垂直な平面内に、 静的シミュレーションの解析で、XY平面上での車両の並進を拘束するために使用します。
この拘束は、静的シミュレーションの解析終了後に解除されます。
Drive joint *オプション
車両に固定されたドライブシャフトとエンジンボディの間の回転ジョイント。 静的シミュレーションの解析で、ディファレンシャルギアをロックするために使用します。
この拘束は、静的シミュレーションの解析終了後に解除されます。
-
Vehicle Parametersタブをクリックして、閉ループコントローラーに必要な車両情報を入力します。

Figure 5.車両パラメータは、フィードフォワードコントローラーが車両の状態を予測するために必要です。これらの車両パラメータは、フィードフォワードコントローラーのいずれかが使用されている場合にのみ必要です。内部モデルは概算であるため、正確な値は必要ありません。タイヤに関連する車両パラメータはシミュレーション中にソルバー内で取得されます。Chassis Vehicle Mass (kg) 車両の合計質量。 フィードフォワードトラクションコントローラーで使用します。
Vehicle Yaw Inertia (kg m2) Z軸を中心とした車両の慣性。 フィードフォワードトラクションコントローラーで使用します。
Front cornering stiffness 2つのフロントタイヤの平均コーナリング剛性。 フィードフォワードトラクションコントローラーで使用します。
Rear cornering stiffness 2つのリアタイヤの平均コーナリング剛性。 フィードフォワードトラクションコントローラーで使用します。
Brakes and Drivetrain Brake bias フロントからリアへ。0は100%フロント、1は100%リア。 フィードフォワードトラクションコントローラーで使用します。
Max front braking torque(N) 車両のフロントアクスルで生成される最大ブレーキトルク。 フィードフォワードトラクションコントローラーで使用します。
Max reat braking torque (N) 車両のリアアクスルで生成される最大ブレーキトルク。 フィードフォワードトラクションコントローラーで使用します。
Drive ratio ドライブカプラー出力および入力シャフト間のカプラー比。デフォルトRWDモデルの場合、駆動比は3.7、デフォルトFWDモデルの場合、駆動比は1。 フィードフォワードトラクションコントローラーで使用します。
車両の方向 Front/Left 車両の方向には、その方向に従って定義した前方ベクトルと左側ベクトルがあります。 これらのベクトルを、Altair Driverで生成する経路の基準として使用します。この経路として、Straight、Constant radius、Single lane change、Double lane changeなどがあります。
フィードフォワードステアリングコントローラーで使用します。
Driverのコンフィギュレーション User override 車両のデフォルトのDriver設定をオーバーライドします。
デフォルトのDriver設定は、ホイール数に基づいて自動的に設定されます(AutoTire)。二輪車の場合はLeaning、三輪車以上の場合は“Non-leaning”です。
三輪車以上であっても車体の傾斜を想定している場合は、User overrideをオンにして設定をLeaningに切り替える必要があります。Leaning/Non-leaning Driverの設定を“Non-leaning”または“Leaning”に設定します。この選択に応じて、モデルに傾斜イベントまたは非傾斜イベントを追加できます。
傾斜イベントでは傾斜ステアリングコントローラー(二輪車の場合)、非傾斜イベントでは非傾斜ステアリングコントローラー(乗用車とトラックの場合)がそれぞれソルバーで使用されます。User overrideをオンにして選択を設定することでデフォルトの選択を変更できます(傾斜可能な三輪車両の場合など)。Note: Driverの設定を変更した場合は、モデルにある既存のイベントをモデルに追加し直す必要があります。