可変式ストラット
可変式ストラットシステムでは、ストラットロッドはビームによってモデル化され、ストラットチューブとのストラットロッドジョイントは点-可変形曲線拘束によってモデル化されます。これにより、ストラットは荷重下で曲げ変形し、ストラットサスペンションに共通する横力によるキャンバーの変化を捕捉できます。
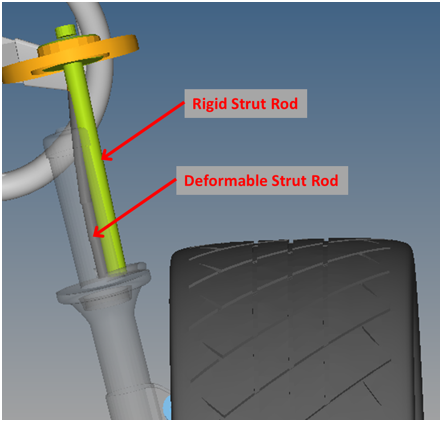
Figure 1. 可変式ストラットシステム
可変式ストラットシステムは、MDLライブラリのマクファーソンストラット式フロントおよびリアサスペンションとrear quad-linkサスペンションにあります。