PCD [ポイントクラウドデータ]
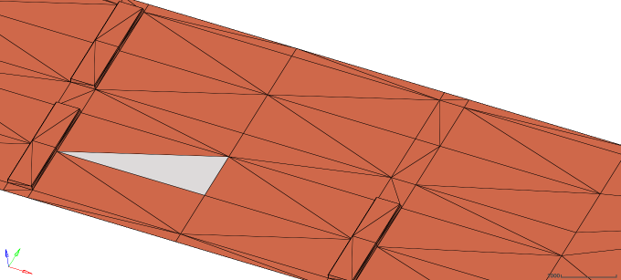
Figure 1. 3Dシェル
路面データ形式
路面サーフェスデータは、2つのテーブルであるNODESとELEMENTSで指定します。
NODESテーブルは4つの列で構成されています。1列目は節点番号と節点数です。この場合の節点は頂点です。2列目、3列目、4列目は、三角形要素の頂点のx、y、z座標です。
[NODES]
{node x_value y_value z_value}
1 0. -2500. 0.
2 0. -2500. 0.
3 25500. -2500. 0.
4 25500. -2500. 0.ELEMENTSテーブルは4つの列で構成されています。1列目、2列目、3列目は、三角形要素を構成する頂点の節点IDです。4列目は、該当要素の摩擦係数です。現在のところ、この情報はソフトウェアでは使用されません。
[ELEMENTS]
{node_1 node_2 node_3 mu}
1 3 2 1
2 4 2 1
3 4 3 1
4 5 6 1路面ファイル
上記の路面データおよびMotionSolveでの必要性に応じて追加した情報を収めたrdfファイルを用意する必要があります。これらのデータとして以下があります:
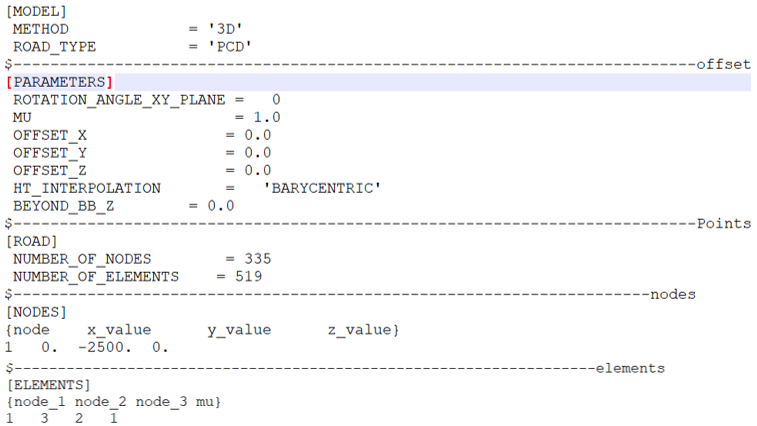
Figure 2. rdfファイル
- UNITSブロック
- 以下を記述したMODELブロック:
- Methodとして’3D’
および
- ROAD_Typeとして’PCD’
- Methodとして’3D’
- 三角形に関する情報を記述したROADブロックは路面サーフェスです:
- NUMBER_OF_NODES
および
- NUMBER_OF_ELEMENTS
- NUMBER_OF_NODES
- 以下を記述したオプションのPARAMETERSブロック:
- OFFSET_ X: 原点のx座標
- OFFSET_ Y: 原点のy座標
- OFFSET_ Z: 原点のz座標
- HT_INTERPOLATION: 接触パッチにおける高さを求めるために使用する補間手法。使用可能な手法は次のとおりです:
- BARYCENTRIC: 三角形でのCPの位置に基づいて重み付けしたCPの高さの平均値。
- LINEAR: 三角形の各頂点における高さの平均値。
- BEYOND_BB_Z: 路面の境界ボックス外部で使用する高さ。
- ROTATION_ANGLE_XY_PLANEを使用して、路面参照マーカー上で路面を回転できます。
Figure 2. rdfファイル
タイヤが路面の最大境界ボックス内部にはあるものの、路面パッチの外にある場合は、それより前に認識されていた高さが使用されます。
ベストプラクティス
三角形化された路面を最大限に活用するには、以下を実行することをお勧めします:
- 最初の時点で、起伏のあるサーフェスや傾斜しているサーフェスに車両を配置すると、MotionSolveでタイヤの静的均衡を確保することが困難になります。このような問題が発生している場合は、平坦なサーフェスに車両を配置することをお勧めします。
- 平坦なサーフェス上では、できる限り大きい要素を使用します。
- 小さい要素は、形状の曲率を捕捉する目的でのみ使用するようにします。
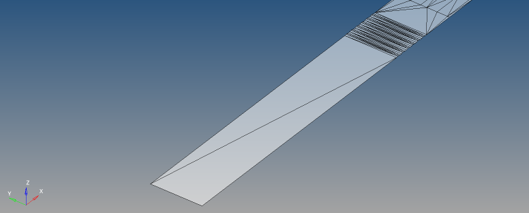
Figure 3. 平坦なサーフェスに使用する大きい要素と、曲率を捕捉するための小さい要素 - x/y座標が同じ位置に複数の節点が存在する場合、正確に垂直な要素をその座標位置に配置しないようにします。代わりに、最下部の節点と最上部の節点の位置に、0.001mのようなわずかな差異を設定するようにします。
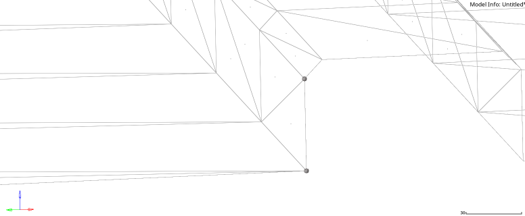
Figure 4. 上記のような正確に垂直な要素を設定しない