電動パワーステアリングシステム
電動パワーステアリングシステムは、制御したエネルギーをステアリングシステムに付加することによって運転者によるステアリング操作を補助し、旋回などの各種操作を容易にします。
- 油圧パワーステアリングシステム(HPAS): ポンプで油圧シリンダーに圧力を供給し、そのシリンダーに結合されたラックピニオンアセンブリを操作して、運転者の操舵力を補います。
- 電動パワーステアリングシステム(EPAS): 直流モーターを使用して、ステアリングシステムに制御したアシストトルクを供給します。
最近の数年間で、次の理由から電動パワーステアリングシステムが主流になっています。第一に、EPASは、さまざまな車両速度に合わせて挙動を変更することにより、個別のニーズに適するように動作を容易にカスタマイズできます。市販されている車両のEPASのほとんどは、車両が低速で走行しているときはアシストを強くし、車両の速度が上がるとアシストを弱くする傾向があります。また、HPASでは、油圧系統の圧力を維持するために油圧ポンプを継続的に運転する必要があります。一方、EPASには、操作が必要なときにのみEPASのモーターに電力を供給すればすむ点で優位性があります。そのため、HPASを使用した同等の車両と比較して車両の燃費が向上します。最後に、EPASは、部品点数が少なく、保守の手間が少ないことから、パワーステアリングシステムとしての訴求力があります。
EPASには、アシストモーターの位置に応じて、コラムアシスト型(C-EPS)、ピニオンアシスト型(P-EPS)、直接駆動型(D-EPS)、およびラックアシスト型(R-EPS)の4種類があります。C-EPS型では、電動アシストユニット、トルクセンサー、およびコントローラーのすべてがステアリングコラムに結合しています。P-EPS型では、電動アシストユニットがステアリングギアのピニオンシャフトに結合しています。この形式は小型車に適しています。D-EPS型では、ステアリングギアとアシストユニットが一体化しているので慣性と摩擦が少なくなります。R-EPS型では、アシストユニットがステアリングギアに結合しています。R-EPS型は、減速比が高いことから慣性が比較的少なく、中型車と大型車に使用できます。
ダブルピニオン構成の電動パワーステアリングシステムは、Car/Small truckライブラリのラックピニオン型ステアリングシステムおよびHeavy Truckライブラリのピットマンステアリングシステムに使用するAssembly Wizardプラグインに用意されています。
MotionView/MotionSolveモデルでの作業
EPASの電子制御ユニットでは、運転者による操舵トルクと車両速度の関数として、必要なアシストトルクを計算します。運転者による操舵トルクは、ステアリングコラムに配置したトルクセンサーで測定します。
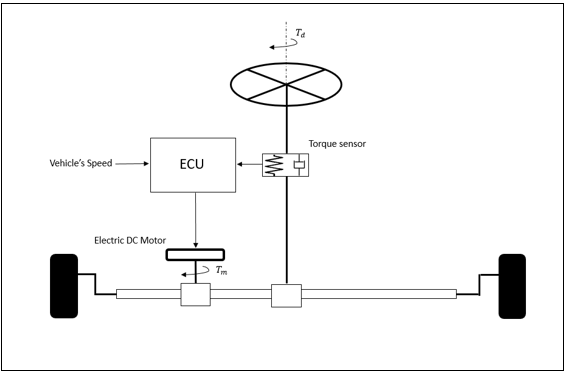
Figure 1.
- 電気モーター
- 電子制御ユニット
- トルクセンサー
電気モーター
簡単な直流モーターは、次の2つの主要な動力学方程式で制御できます。
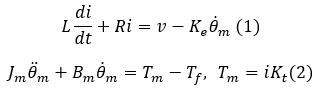
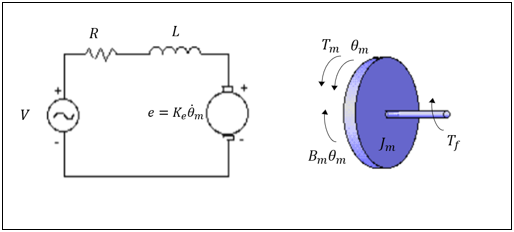
Figure 2.
 と
と はモーターの慣性定数と減衰定数、
はモーターの慣性定数と減衰定数、 と
と はモーターの電機子巻線のインダクタンスと抵抗、
はモーターの電機子巻線のインダクタンスと抵抗、 は電機子電流、
は電機子電流、 と
と はモーターの逆起電力定数とトルク定数、
はモーターの逆起電力定数とトルク定数、 と
と はモーターで発生する電磁トルクと、タイヤ力によってモーターシャフトに作用するカウンターバランストルクです。
はモーターで発生する電磁トルクと、タイヤ力によってモーターシャフトに作用するカウンターバランストルクです。
の計算方法です。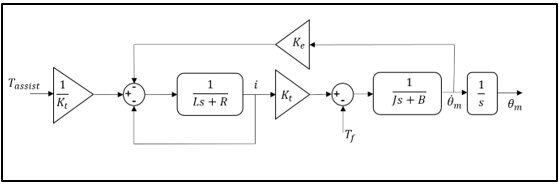
Figure 3.
- Activateのモーターパートでモーターの角速度を使用して逆起電力電圧を計算すると同時に、現在値のフィードバックを使用して、必要な電気トルクを出力します。
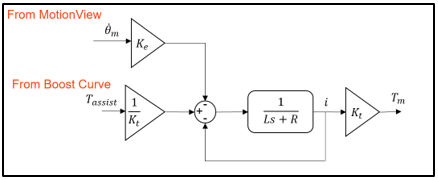
Figure 4. - MotionViewのモーターパートは、モーターの慣性特性を表すボディ、およびパワーステアリングシステムと相互作用するラックボディによるラックアンドピニオンカプラーで構成されています。
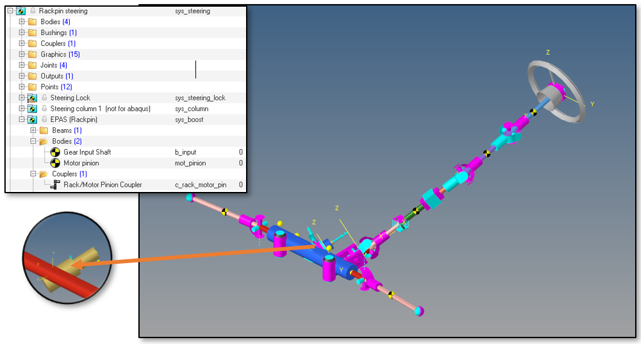
Figure 5.
| パラメータ | モデル | デフォルト値 | 単位 |
|---|---|---|---|
インダクタンス( ) ) |
Activate | 9.06e-5 |  |
抵抗( ) ) |
Activate | 0.0035 |  |
| トルク係数() |
Activate | 0.05285 | - |
| 逆起電力係数() |
Activate | 0.05285 | - |
| 慣性() |
MotionView | 1000 |  |
MotionViewモデルで使用するActivateダイヤグラムとFMUには、インストール環境の次の場所からアクセスできます。 <install_dir>\hwdesktop\hw\mdl\mdllib\Common\FMU_Library\EPAS\FMU_source
トルクセンサー
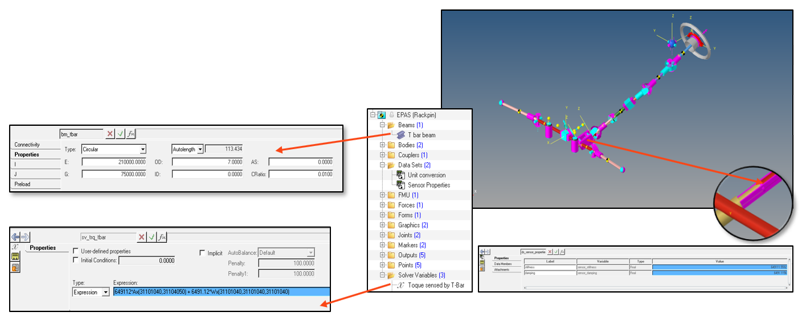
Figure 6.
| パラメータ | デフォルト値 | 単位 |
|---|---|---|
| ヤング率(E) | 21000 |  |
| せん断弾性係数(G) | 75000 | |
| 外径(OD) | 7 |  |
| 内径(ID) | 0 | |
| 減衰係数(CRatio) | 0.01 | - |
ブースト曲線
 では0で、以降は|Td|≧Tdmaxのときに得られる
では0で、以降は|Td|≧Tdmaxのときに得られる に達するまで線形に増加します。車両の安定性と制御性を維持するために、Tsatの値は車両の縦速度の増加に伴って線形に減少もします。運転者の入力トルク
に達するまで線形に増加します。車両の安定性と制御性を維持するために、Tsatの値は車両の縦速度の増加に伴って線形に減少もします。運転者の入力トルク と車両の速度
と車両の速度 は、MotionViewで車両のモデルからのプラント出力変数です。
は、MotionViewで車両のモデルからのプラント出力変数です。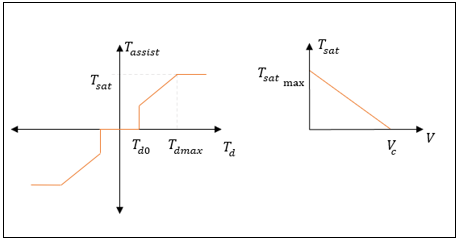
Figure 7.
| パラメータ | デフォルト値 | 単位 |
|---|---|---|
運転者の最小トルク( ) ) |
1 |  |
運転者の最大トルク( ) ) |
8 | |
モーターの最大トルク( ) ) |
20 | |
アシストの必要がなくなる車両の速度( ) ) |
100 |  |
EPASシステムを使用したフルビークルモデルの作成
MBD-Vehicle Dynamics Toolsをプリファレンスファイルとして読み込む必要があります。
Update Modeユーティリティは、MBD-Vehicle Dynamics Toolsプロファイルが読み込まれている場合にのみ使用できます。以下の手順で、このプロファイルを読み込み、ユーティリティにアクセスします。
-
メニューバーから を選択します。
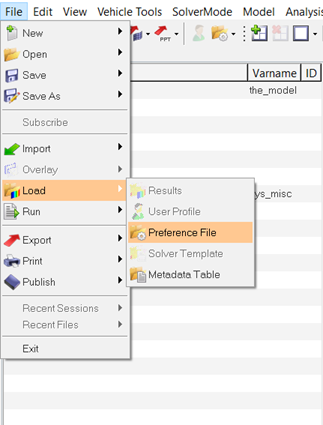
Figure 8. -
MBD-Vehicle Dynamics Toolsプロファイルを選択し、Loadをクリックします。
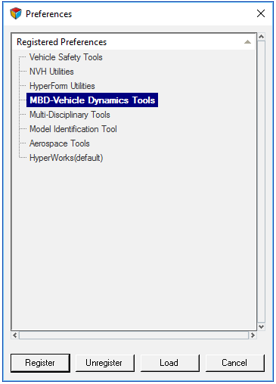
Figure 9. -
をクリックします。
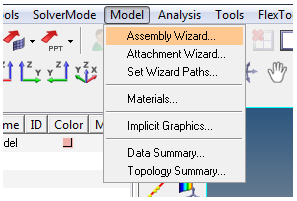
Figure 10. -
Model Typeウィンドウで以下を選択します。
-
電動アシストステアリングシステムを追加するために、primary systemsにおいて、steering linkagesとしてRackpin steeringを選択する必要があります。
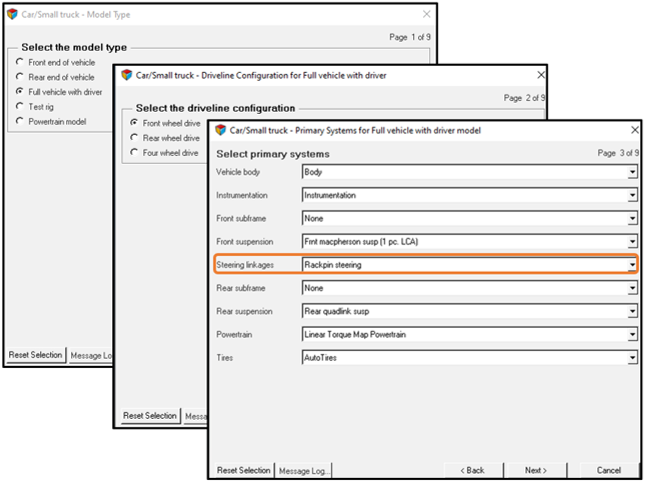
Figure 11.
-
電動アシストステアリングシステムを追加するために、primary systemsにおいて、steering linkagesとしてRackpin steeringを選択する必要があります。
-
steering subsystemsで、EPAS (Rackpin) がSteering boost methodとして利用できるようになります。
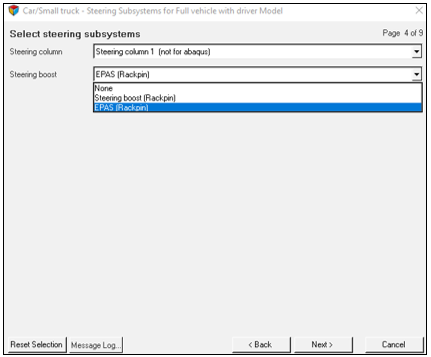
Figure 12.その他のモデルシステムを必要に応じて選択します。
Assemblyウィザードの選択項目を完了すると、Altair Driverと電動パワーアシストステアリングシステムを搭載したフルビークルモデルが完成します。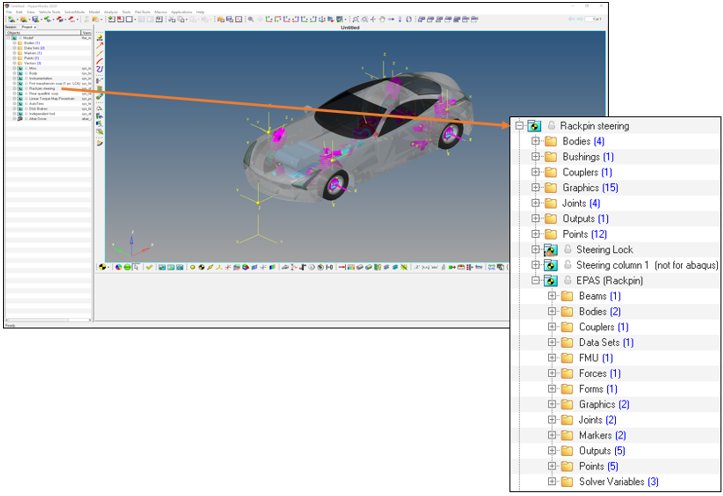
Figure 13.Sinusoidal SteeringやStep Steerイベントなどのステアリング操作のシミュレーションは、EPASシステムの挙動を理解するのに役立ちます。以下の図では、この2つのイベントをイベント設定で表示し、ステアリングシステムを搭載していない車両が全く同じ操作を行った場合の結果と比較しています。
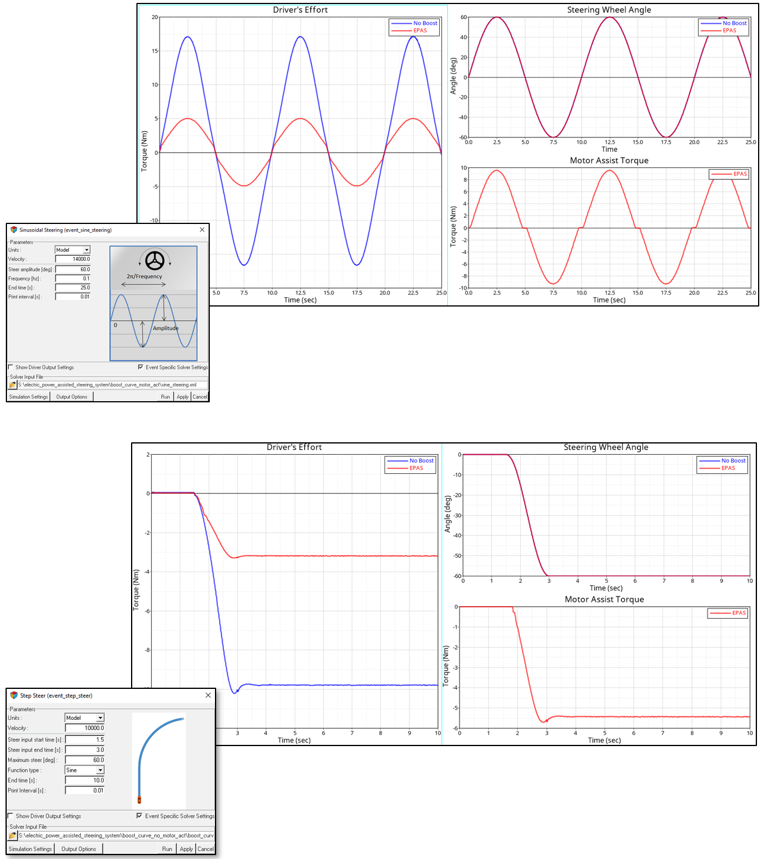
Figure 14.