As nodal constraints are based on kinematic conditions applied on nodal DOF,
therefore it is not allowed to apply two nodal constraints to the same set of nodes, unless
the induced kinematic conditions are perfectly orthogonal (for example: boundary condition
in the X-direction and rigid link in the Y-direction).
Radioss Starter will issue the following warning each time two nodal
constraints are applied to the same set of
nodes.
It is of very important to take all warnings about incompatible kinematic conditions into account. True incompatible kinematic conditions (that is, nodes belonging to several rigid bodies) can generate energy and local instability. In such a case, accuracy of the results will be seriously decreased.
Radioss Starter does not check if the kinematic conditions are really
incompatible. If they are strictly orthogonal, or if they are not applied
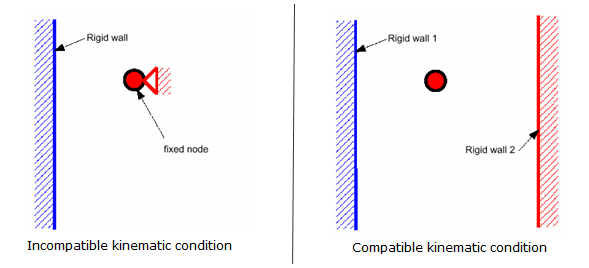
simultaneously, just ignore the warning. Figure 1 illustrates
two cases: in the first case, a node is secondary on a rigid wall and has a boundary
condition in a non-orthogonal direction. If the rigid wall is fixed, there are no
possible incompatible conditions (the node cannot impact on the wall). If the wall
is moving, it is impossible after impact to respect both conditions. Therefore, the
boundary condition is not applied and the reaction forces on the wall are incorrect.
In the second case, a node is defined as a secondary for two parallel walls. If the
two rigid walls are fixed, there are no possible incompatible conditions, as the
node cannot impact the two walls at the same time. If one wall is moving, that
results no problem, as long the moving wall is not crossing the fixed wall. Figure 1. Radioss Warning for Kinematic
Conditions
On a multi-processor Radioss version, a run executed twice can give
different results if some kinematic conditions are incompatible. This is still true
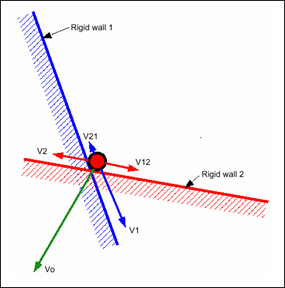
if option /PARITH/ON is being used. For example, if a secondary
node impacting on two non-orthogonal rigid walls, as shown in Figure 2, the results obtained on a multi-processor can be arbitrary. If rigid wall 1 is
computed before rigid wall 2, velocity V0 is replaced with velocity V12. If rigid
wall 2 is computed before rigid wall 1, velocity V0 becomes V21. On multi-processor
computers, the order in which rigid walls and other kinematic conditions are applied
is arbitrary and can be changed from one cycle to the next and from one run to
another. Figure 2. Arbitrary Results with Incompatible Kinematic Conditions
The Langrange Multiplier method allows applying several nodal constraints to the same set of nodes as it resolves a global system of equations with all Langrange Multiplier constrains. However, it is not allowed to mix both methods for the same set of nodes. Nevertheless, both methods can be used successfully in a model, as long as they are applied to different nodes.