Several friction formulations are available within Radioss. The simplest one, which is also the most used, is the Coulomb friction law. This
formulation provides accurate results in crash analysis and requires just one
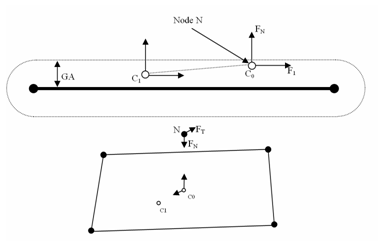
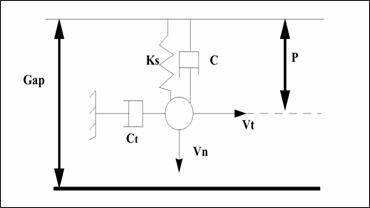
parameter (Coulomb friction coefficient, ). Figure 1. Normal and Tangential Forces Applied to a Node Figure 2. Adhesion Force Computation
The default value for is 0 (no friction between surfaces). To compute the
friction force, the default friction penalty formulation is a viscous one, based on
the tangential velocity. During sliding penetrate the node goes from position
C0 (contact point at time
t) to C1
(contact position at time ). As the contact is viscous, a viscous coefficient
C is introduced to compute the adhesion
force:(1)
Where,
K
Instantaneous interface stiffness
VISF
Critical damping coefficient on interface friction
M
Main node mass
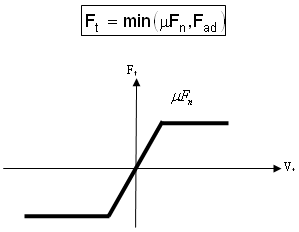
Once the adhesion force (Fh) is computed, if it is less
than , the friction force is unchanged equaling
Fh and sticking will occur. If
the adhesion force is greater than , then the friction force is reduced and equals .(2)
Figure 3. Friction Force Computation
If sliding occurs at a very low speed (for example: quasi-static simulation), the
viscous formulation will not work, as the friction force is computed upon the
tangential speed. To overcome this limitation, a new friction penalty formulation is
available based on tangential displacement (stiffness incremental formulation). This
method introduces an artificial stiffness, K to calculate the
variation of the friction force:(3)
Where,
Tangent displacement
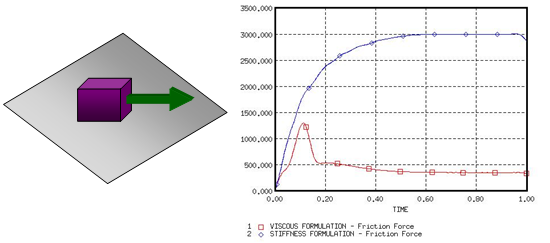
Therefore, contrary to the previous formulation, the stiffness formulation is able to
compute the proper friction force even at a low speed. Figure 4
illustrates this point. If an imposed displacement is applied to a part (a 3D cube)
at a low speed (0.01 m/s), the viscous formulation will not work; whereas the
stiffness formulation based on the tangential displacement will. Figure 4. Viscous Formulation vs Stiffness Formulation
Other friction formulations are available, their principle is similar to the Coulomb
friction law. Radioss first computes an adhesion force,
which is then compared to . Their differences lie in the friction coefficient
() which is not constant anymore, but function on the
pressure of the normal force on the main segment and on the tangential velocity of
the secondary node. Depending on the flag Ifric, three new friction formulations are available:
Generalized Viscous Friction Law
(4)
Modified Darmstad Friction Law
(5)
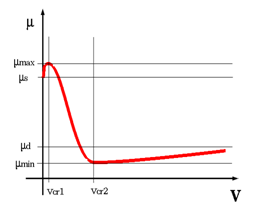
Renard Friction Law
(6)
if (7)
(8)
if (9)
(10)
if (11)
(12)
Note: Friction filtering is available for all friction formulations and
allows you to smooth the friction force. Refer to RadiossStarter Input for more details.
Figure 5. Graphical Representation of Renard Friction Model