ドライブライン
ドライブラインは、動力源から駆動輪に動力を伝達します。
動力は、ギアボックスの出力軸と後輪を接続しているチェーンまたはベルトによって伝達されます。このライブラリでは、フォース、ジョイント、マーカー、ソルバー変数の組み合わせを使用して、このメカニズムがモデル化されています。
以下の図は、動力が伝達される仕組みを概略的に示しています。
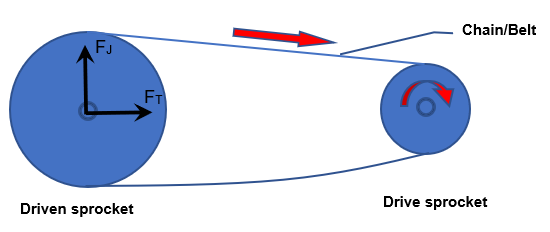
Figure 1.
Figure 1.
駆動スプロケットは、ギアボックス出力軸から動力を得ています。この動力(またはそれによって得られる運動)により、後輪に取り付けられた従動スプロケットが駆動されます。赤い矢印は、スプロケットの回転運動とチェーンの線形運動を示しています。
このドライブラインでは、2つのスプロケット間での回転運動の伝達のほか、従動スプロケットと後輪に次のフォースが発生します。
- FT: 張力または引張力。
- FJ: チェーンに対する張力が強い側でチェーンが駆動スプロケットによって引っ張られることによって発生するジャッキング力または垂直力。
これらのスプロケットが同じ平面にない場合は、これらのスプロケットの間で横力も作用します。二輪車ライブラリでは、この力はモデル化されていません。
ドライブラインの各フォースのモデル化
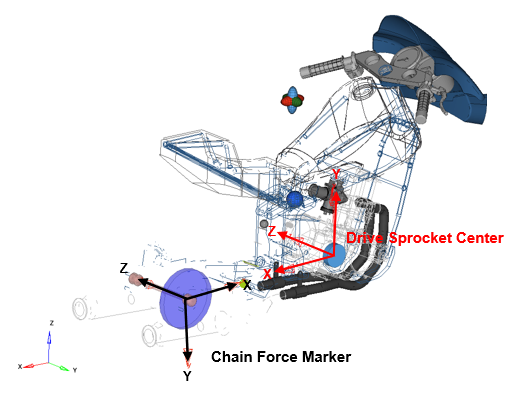
Figure 2.
Note: ドライブラインのフォースとその関連要素を、指定のとおりに正確にモデル化する必要があります。このモデル化で最も重要な点は、マーカーの位置と向きです。
- Vector
- 従動スプロケットの回転軸: 後輪の回転軸(従動スプロケットの回転軸)を定義するベクトル。
- ボディ
- チェーン解析ダミーボディ: このダミーボディは、後輪の中心に拘束され、駆動スプロケットと従動スプロケットの間で視線が維持されるような向きに配置されています。
- マーカー
- 次の2つのマーカーが必要です:
- チェーンフォースマーカー: 従動 / 後側スプロケットの中心に配置されたチェーン解析ダミー上のマーカーであり、次の条件を満たします:
- X軸は前側スプロケットの中心を向いています。
- Z軸は後側スプロケットの回転軸方向を向いています。
- 駆動スプロケットの中心: 駆動 / 前側スプロケットの中心に配置されたエンジン / 駆動スプロケット上のマーカーであり、次の条件を満たします:
- X軸は後側スプロケットの中心を向いています。
- Z軸はギアボックス出力軸の回転軸方向を向いています。
- チェーンフォースマーカー: 従動 / 後側スプロケットの中心に配置されたチェーン解析ダミー上のマーカーであり、次の条件を満たします:
- ジョイント
- 以下のジョイントによってチェーンの配置がモデル化されます:
- チェーンダミーボディから従動スプロケットまでのジョイント: チェーン解析ダミーボディと後輪の間のボールジョイント
- 駆動スプロケットからチェーンダミーボディまでのジョイント: エンジン / 駆動スプロケットとチェーン解析ダミーボディの間のインラインジョイント(従動 / 後側スプロケットの中心を向いています)
- チェーン平面のY軸から従動スプロケットまでのジョイント: チェーン解析ダミーボディと後輪の間の平面内ジョイント(従動スプロケットの回転軸方向に法線を持っています)
これら3つのジョイントによって、次の条件を満たすように、チェーン解析ダミーボディ上のチェーンフォースマーカーが拘束されます:- X軸は駆動スプロケットの中心を向いています。
- Z軸は後輪の回転軸方向を向いています。
- フォース
- チェーンフォース要素は、チェーンフォースマーカーを基準として作成されています。このフォースは、後輪とエンジン / 駆動スプロケットの間に作用します。このフォースは次の成分で構成されています:
- Fx: 2つのスプロケットを結合するライン方向に作用します。エンジンのトルクによって発生するチェーン張力(FT)です。
- Fy: Fxと垂直の方向に作用します。エンジンのトルクによって発生するジャッキング力(FJ)です。
- Tz: 回転方向に作用します。2つのスプロケットのサイズの比率によってエンジンのトルクがスケーリングされて発生するフォースです。