システムの作成と編集
システムは、親コンテナと同じファイルにインラインで保存された定義を有するモデリングコンテナエンティティです。
システムは次のような特徴で表現されます:
- 別のシステムエンティティまたは他のコンテナーエンティティ(アセンブリまたはアナリシス)の子となることができる。
- ポイント、ボディ、ジョイント、フォースなどの他のモデリングエンティティで構成できる。
- MDLでは、*DefineSystem()で定義したシステム定義ブロックを参照する*System()ステートメントを使用して定義をインスタンス化することにより、システムを作成する。
- その定義は、親の定義ファイルでインライン化されている。例えば、子エンティティ定義で構成したシステム定義が、その親定義と同じファイルに保存されている。
- システムのデータは、親コンテナのデータファイルにあるデータブロック*BeginContext()に保存されている。
以下の例のモデルは、システムのコンセプトを表すものです。このモデルは、~hw_install/demos/mv_hv_hg/modeling/mdl_examples/container_entities/system_analysis/door.mdlに用意されています。下の図は、車のハッチバックドアの簡略化されたモデル、およびそのモデルのmdlファイルを示しています。このモデルは、Hatchback Systemというシステムにまとめられており、そのシステムには2つの子システムとしてDoor SystemとDamper Systemがあります。
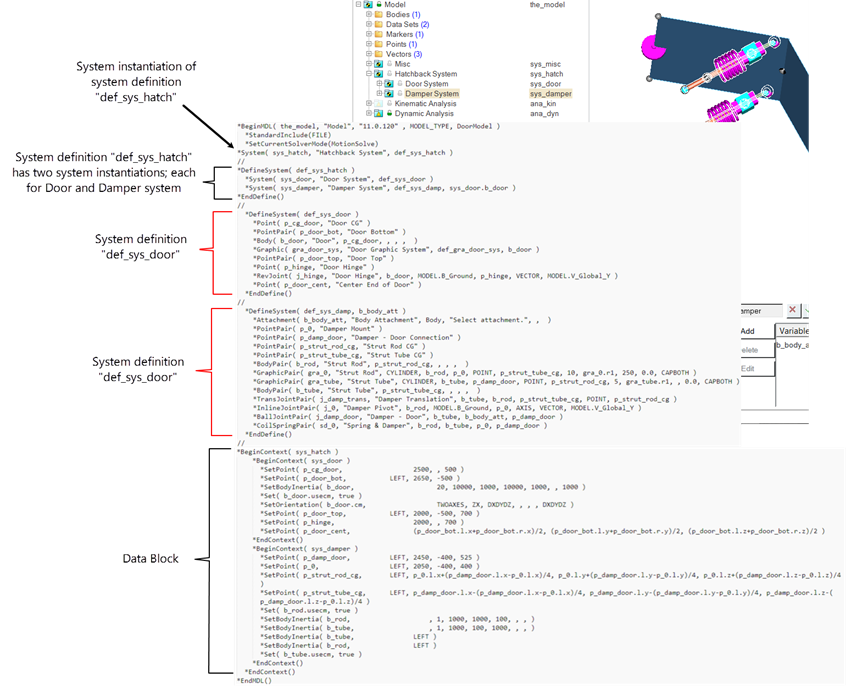 Figure 1.
Figure 1. Door Systemには、ドアとそのヒンジジョイントがあります。Damper Systemには、ダンパボディ、グラウンドとダンパボディとのジョイント、ドアとダンパボディとのジョイントがあります。ドアとダンパとのジョイントを定義するために、ドアのボディはアタッチメントとしてDamper Systemに渡されます。
MDLファイルは、次のようになります。
- モデル全体の情報は、*BeginMDL - *EndMDLブロックに含まれる
- Hatchback System(変数名sys_hatch)は、このモデルの子としてインスタンス化され、定義def_sys_hatchを参照する。sys_hatchは、システム定義def_sys_hatchのインスタンスとして呼び出される。
- この定義には、それぞれシステム定義def_sys_doorおよびdef_sys_dampのインスタンスである2つのシステムインスタンスsys_doorおよびsys_damperがある。
- Doorボディ(変数名b_door)は、システムsys_damperへのアタッチメントとして渡される。
- モデル内のエンティティのデータは、階層構造となっている *BeginContext - *EndContextブロックに記述される。
システムの追加
Systemsツールを使用して、モデルにシステムとアセンブリを追加します。
システムの編集
Project Browserでシステムをクリックすると、選択内容を編集できるパネルが開きます。
コンプライアントジョイントの切り替えに加え、MotionViewでは、事前に定義されたシステム設定に従って、システム内の他のエンティティのオン / オフ切り替えを行うことができます。例えば、MotionViewでは、システムが非コンプライアントとされた際に、スプリングやスタビライザーバー等の特定のエンティティをオフにできます。