チュートリアル:Flux 2DとIPMモーターの連成シミュレーション
埋込磁石型モーターのFlux 2Dモデルに三相正弦電流を供給するActivateモデルを作成して、これらのモデルの連成シミュレーションくを実行します。
この連成シミュレーションプロセスは、次の4つの基本的なステップで構成されています:
- Fluxモデルを作成します。このチュートリアルでは、IPMモーターのFluxモデルが用意されています。
- ActivateでFluxモデルデータを読み込むために必要なFlux連成コンポーネントを生成します。
- Activateモデルを作成して、Flux連成コンポーネントを読み込むためのFluxブロックを追加します。
- Activateモデルの連成シミュレーションを行います。
このチュートリアルのファイル
IPM_motor_Multiphysics_positionF2STA.FLU、IPM_motor_Multiphysics_position.F2STA、IPM_motor_Multiphysics_positionF2STA.scm
Flux IPMモーターの概要
このFluxモデルは、電気自動車で利用できるブラシレスAC埋込磁石型モーターです。
- ヨーク、スロット、巻線で構成する固定部(固定子)
- 空隙
- 埋込磁石で構成する可動ローター
このIPMモーターは三相正弦電流によって駆動され、キネマティクスタイプのマルチフィジックスポジションで回転します。シミュレートされたモーター性能は、トルク、相電流、速度、およびローター位置の計算に適用されます。
このIPMモーターの入力は複合領域のパラメーターで定義されており、以下の各要素で構成されています。
- I_1:物理量: μr、Bs、Br
- I_2 :電気量:抵抗、電圧、電流
- I_3:力学量:位置、速度、電磁トルク
このIPMモーターの出力は、センサー、数式(トルク)、およびパラメーター(位置、速度、加速度)を通じて値を取得するスカラー入出力設定です。


このIPMモーターの回路は、電流源、コイル導体、抵抗器、およびインダクタンスで構成されています。
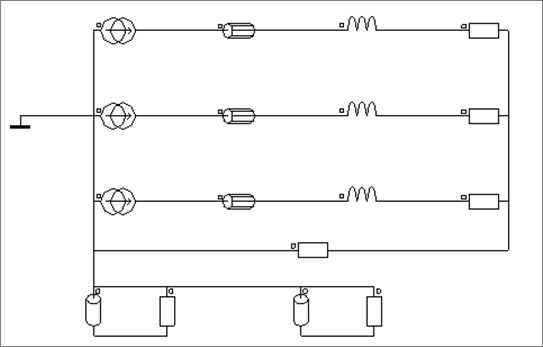 Figure 1. IPMモーターの電気回路
Figure 1. IPMモーターの電気回路Fluxでの連成コンポーネントの生成
Fluxモデルを読み込んで、必要な入力、出力、およびパラメーターを設定した連成コンポーネントを生成します。
-
Fluxを起動して、作業ディレクトリからIPM_motor_Multiphysics_positionF2STA.FLUプロジェクトを開きます。
モデルが読み込まれて、次の図のように表示されます。
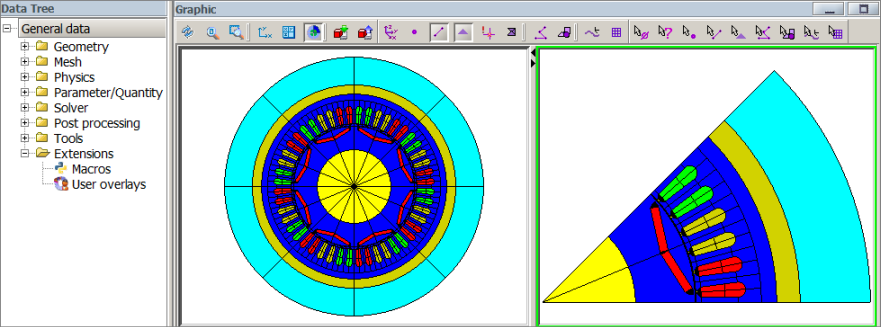 Figure 2. IPMモーターの断面図
Figure 2. IPMモーターの断面図 -
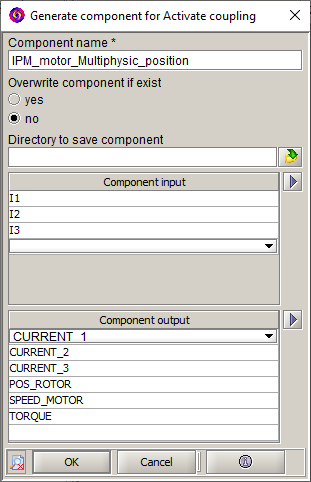
ダイアログで、該当のコンポーネントに関する次の情報を入力します:
- コンポーネントの名前を入力します:IPM_motor_Multiphysics_positionF2STA
- 作業ディレクトリのパスを入力します: <name_without_spaces>
- コンポーネントに対する入力(形状入出力パラメーター)を選択します:I1, I2, I3
- 出力を選択します:PHASE_CURRENT_1、PHASE_CURRENT_2、PHASE_CURRENT_3、TORQUE、SPEED_MOTOR、およびPOS_ROTOR。
ダイアログの内容は次の図のようになります:
Activateモデルの作成
IPMモーターのFluxモデルに三相正弦電流を供給するモデルを作成します。
-
OKをクリックします。
Fluxブロックダイアログは次の図のようになります:
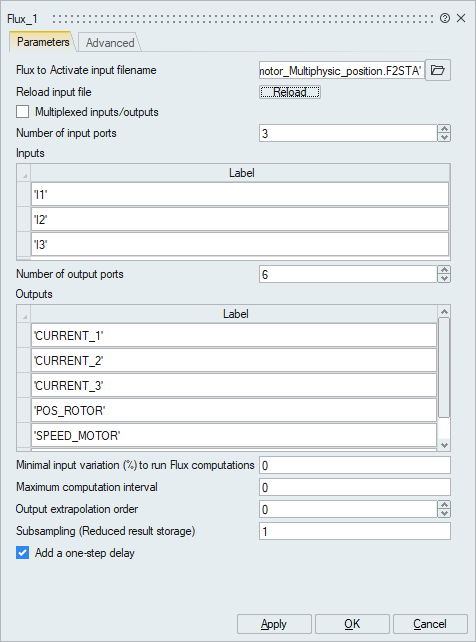
-
これらのブロックを次の図のように組み立てて接続してから、モデルを保存します。
Figure 3. 入力と出力を使用して組み立てたFluxブロック 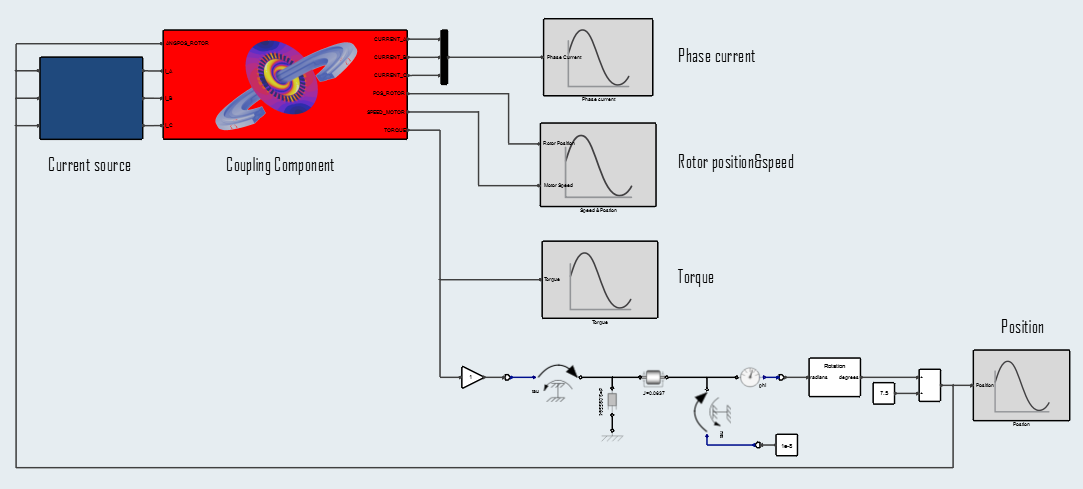
Activateモデルが完成し、IPMモーターのFluxモデルに三相電流を供給するように構成されています。
ActivateモデルとFluxモデルの連成シミュレーション
連成シミュレーション時に、ActivateモデルからIPMモーターのFluxモデルに三相正弦電流が供給されます。シミュレーション結果には、IPMモーターの性能が示されます(一定速度での損失とトルクなど)。
-
リボンで、シミュレーションツールグループ
 にカーソルを合わせて、設定
にカーソルを合わせて、設定 を選択します。
を選択します。
-
リボンでRun
 を選択します。
シミュレーション結果には、モーターに供給される電流とモーターの性能が示されます。
を選択します。
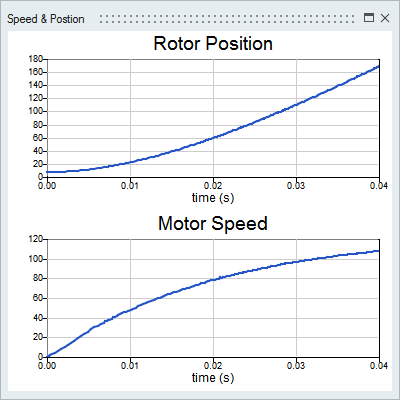
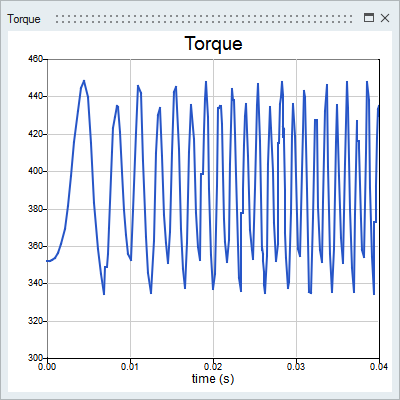
シミュレーション結果には、モーターに供給される電流とモーターの性能が示されます。Figure 4. 相電流 (A)、ローターの位置 (deg)、 モーター速度 (deg/s)、 トルク (Nm) 、および位置 (deg) 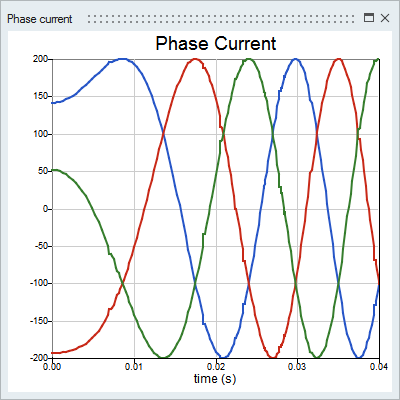
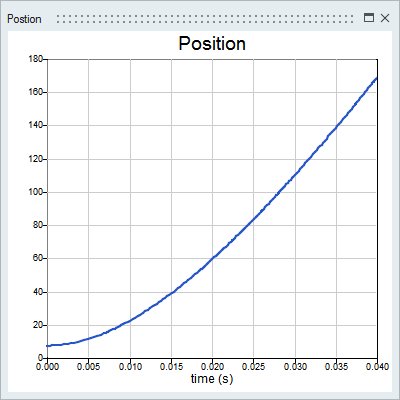
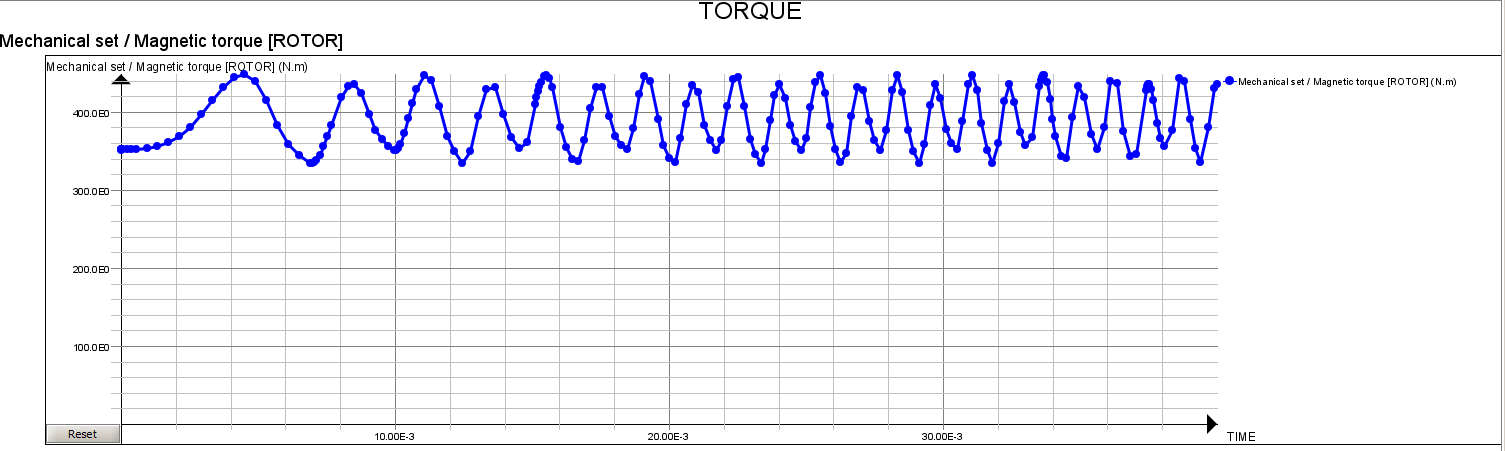
Fluxの結果処理では、等密度分布、相電流、ローターの位置、モーター速度、トルク、および位置が示されます。
Figure 5. Fluxの等密度分布 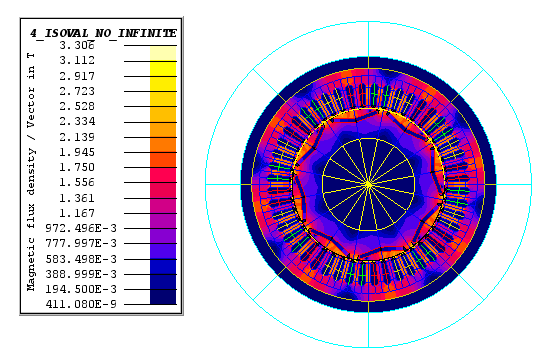
Figure 6. 相電流 (A) 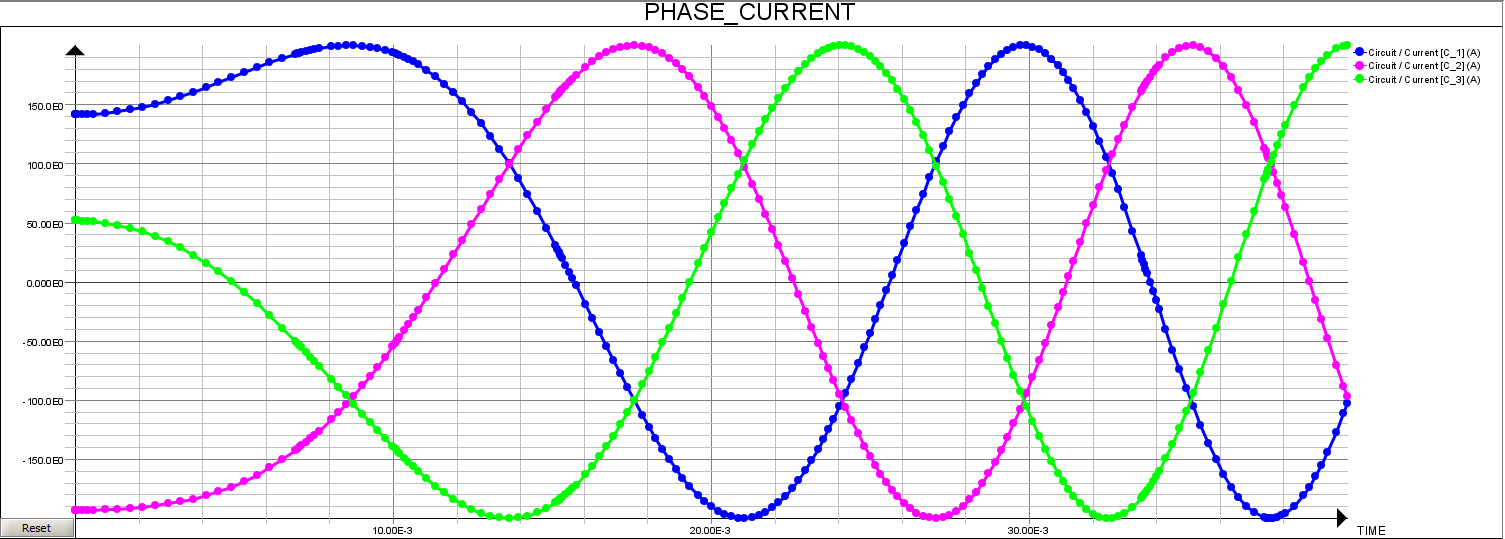
Figure 7. ローター位置(deg) 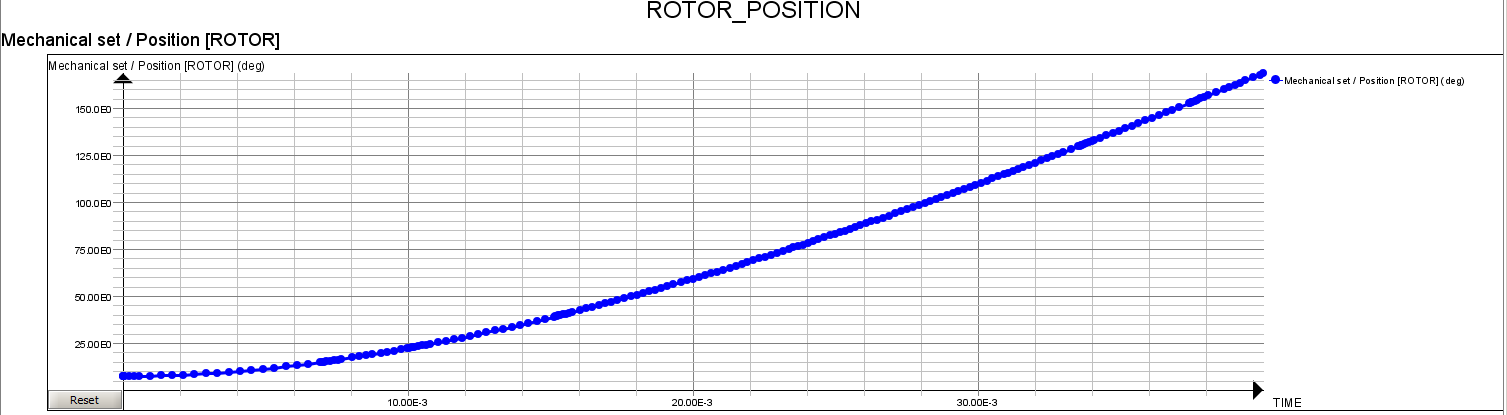
Figure 8. モーター速度(deg/s) 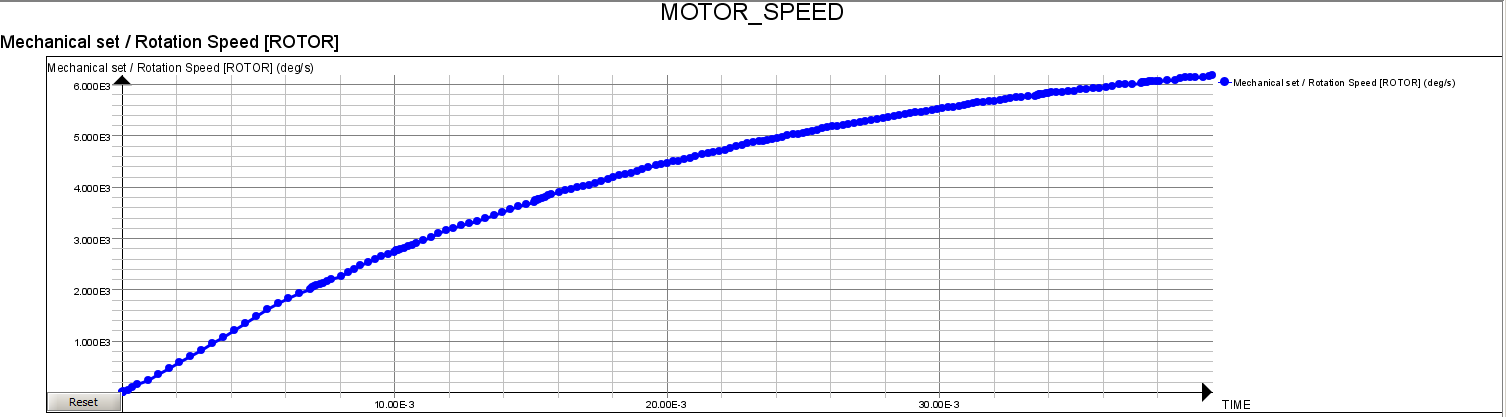
Figure 9. トルク