There are three different ways for modeling spotweld:
Node connect
Spring (/PROP/TYPE13) connect
Solid connect
Spring (/PROP/TYPE13) connect and solid connect could also model
bolt or adhesive connect (glue).
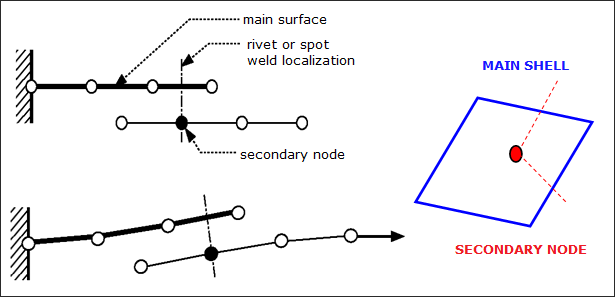
Node Connect
A single interface TYPE2 with the first surface as main side and some nodes from
second surface as secondary nodes: With this solution the mesh of the main surface
can be independent of the spotweld location. Hourglass problems disappear on the
main surface. On the second shell, the surface mesh has to respect the spotweld
location and the hourglass problem will remain. The main problem with this modeling
approach is the undeformability of the connection and its infinite strength. Figure 1. Example of Connection between 2 Shell Surfaces
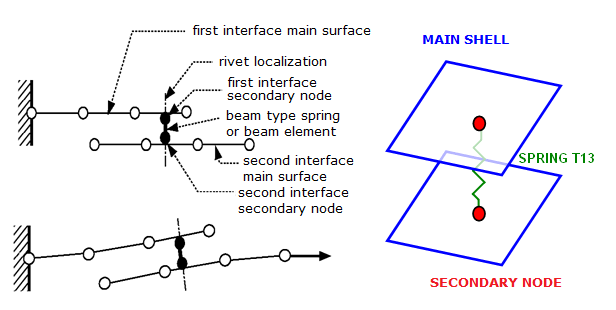
Spring (/PROP/TYPE13) Connect
Two tied interfaces and a spring: The use of two tied interfaces will provide a full
symmetrical solution allowing a free mesh on the two surfaces and avoiding
hourglass. The spotweld is modeled with a beam type spring element. The element uses
independent nodes not connected on the shell elements. One of the two nodes is
located on the first surface (or near, there is no need to be located exactly on the
shell surface) and the second node is located on the second surface. One tied
interface connects one spring node with the first surface and a second tied
interface does the same on the second surface. Figure 2. Spotweld Modeling
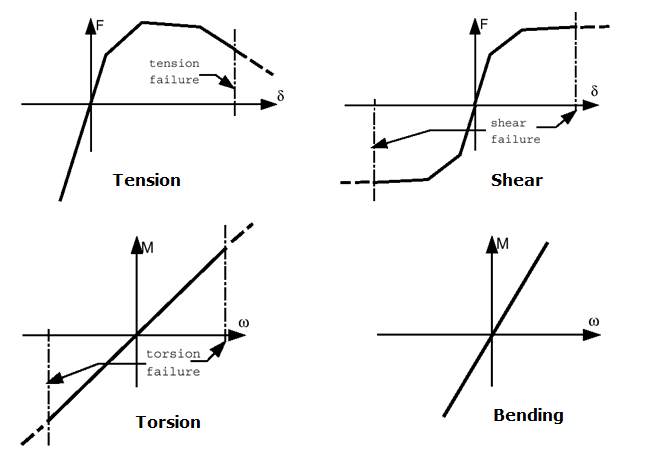
To create a spotweld using this method is a good alternative solution with this
approach the connection location is independent from the shell mesh. It is accurate
since the spotweld properties are input directly to Spring TYPE13. Below is a basic
input for Spring TYPE13 to model spotwelds. Figure 3. Spring TYPE13 - Typical Input for Spotweld
Moreover, two different way for modeling rupture of the spotweld:
Use failure criteria which available for a Spring TYPE13. For more details,
see the comments on failure criteria in /PROP/TYPE13 (SPR_BEAM).
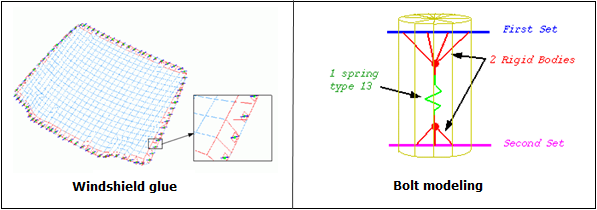
Note: The
modeling technique for the spotweld can also be used for other kinds of
connections as welding lines, hemming, glue and bolts. For bolt modeling
the use of tied interface is not necessary, as the shell nodes can be
put directly in the rigid bodies.
Figure 4. Glue and Bolt Modeling Examples
Note: With a tied interface, the secondary node mass is transferred to the main nodes.
If Spotflag is set to 1, the secondary node inertia is equally
distributed over the main nodes by adding mass, so that the induced inertia (at the
center of the main surface) is equal to the inertia of the secondary node. If the
main surface is a perfect square, the added mass is computed as:
: added mass
L: distance between the main node and the center
: inertia of the secondary node
As long as the secondary node inertia is realistic, the added mass will be very
small. A large added mass is observed if the secondary node is a distance from the
main surface. The ideal will be for the secondary node to lie on the main surface
right at the center. If this is not the case, the secondary node has inertia at the
center of the shell surface:
Secondary node mass
Distance between the secondary node and the center
Inertia of the secondary node
Consequently, a new added mass is set to the main nodes, so that the inertia (due to
this new added mass) is equal to the inertia, due to the off-centering of the
secondary node.(1)
If Spotflag=0, there is no added mass, since the secondary node inertia
is transferred as inertia to the main node. An added inertia that is too large will
seriously decrease the accuracy.
Solid Connect
Use 8-node brick element (with /PROP/TYPE43) and
/MAT/LAW59 +/FAIL/CONNECT (or
/MAT/LAW83+/FAIL/SNCONNECT) to modeling
solid spotweld, which could provide more accurate results.
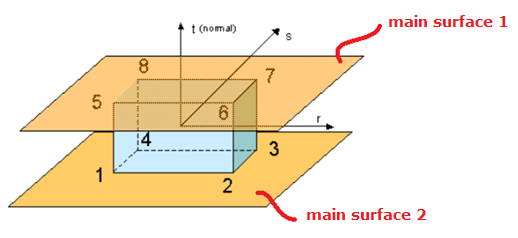
The brick element use /PROP/TYPE43 and it has 4
integration point on the shear plane, which is between plane (1, 2, 3, 4)
and plane (5, 6, 7, 8). One integration point in normal direction
t. This element does not have time step itself and
its stability is done by the nodal connection. So the thickness of a
spotweld could be very small. This character is very useful for modeling
glue. Figure 5.
/INTER/TYPE2 used to connect solid spotweld with two
upper and lower main surfaces.
For this modeling
/MAT/LAW59+/FAIL/CONNECT (or
/MAT/LAW83+/FAIL/SNCONNECT) could
be used for solid spotweld.
/MAT/LAW59 defines normal stress and shear stress
curve (strain rate dependent) to describe the material
character.
With /FAIL/CONNECT elongation criteria and/or
energy criteria could be used to describe the failure of
spotweld.
The failure occurs when the normal relative displacement or shear
relative displacement is reached according 2 behavior type:
Uncoupled failure (Ifail=0: uni-directional failure)
(2)
with i=33 for normal direction
and 13 or 23 for tangent directions
The element deletion occurs when one integration
point reaches the failure criteria, if Isolid=1, or all integration points reach the
failure criteria, if Isolid=2.
Use α and in /MAT/LAW83 to fit
peel load and mixed-mode load cases (ex: 30° and 60° load)
In /FAIL/SNCONNECT defined is plastic elongation
vs plastic elongation rate for damage initiation, failure for normal
and shear direction.