MV-1029: 点-可変形サーフェスフォース(PTdSF)のモデル化
本チュートリアルでは、接触力を伴うPTdSF(点-可変形サーフェス)ジョイントをモデル化する方法について学習します。
ポイントの作成
このステップでは、PTdSFフォースモデルに必要なポイントを作成します。
始める前に、mbd_modeling\interactiveフォルダーにあるPlate.h3dおよびmembrane.femファイルを自身の<作業ディレクトリ>にコピーします。
-
以下のいずれかの方法で、Add Point or PointPairダイアログを開きます:
- Project Browserで、Modelを右クリックして を選択します。
- Model-Referenceツールバーで、
 (Point)アイコンを右クリックします。
(Point)アイコンを右クリックします。
ボディの作成
このステップでは、PTdSFフォースモデルに膜とボールのボディを作成します。
-
以下のいずれかの方法で、Add Body or BodyPairダイアログを開きます:
- Project Browserから、Modelを右クリックし、を選択します。
- Model-Referenceツールバーで、
 (Body)アイコンを右クリックします。
(Body)アイコンを右クリックします。
-
 (Graphic fileブラウザ)アイコンをクリックし、<作業ディレクトリ>からPlate.h3dを選択します。
(Graphic fileブラウザ)アイコンをクリックし、<作業ディレクトリ>からPlate.h3dを選択します。
-
 をダブルクリックします。
をダブルクリックします。
マーカーと可変形サーフェスの作成
このステップでは、膜に必要なマーカーを定義します。
-
generalツールバーでをクリックします。
Figure 1. -
Deformable Surface from FEMパネルで
 をダブルクリックします。
をダブルクリックします。
-
 をダブルクリックします。
をダブルクリックします。
-
続いてFEMファイルを選択するために、(ファイルブラウザ)アイコンをクリックします。
-
作業ディレクトリからmembrane.femファイルを選択し、OKをクリックします。

Figure 2.
ジョイントの作成
このステップでは、膜とグラウンドとの間の固定ジョイントを定義します。
-
以下のいずれかの方法で、Add Joint or JointPairダイアログを開きます:
- Project Browserから、Modelを右クリックし、を選択します。
- Model-Constraintsツールバーで、
 (Joints)アイコンを右クリックします。
(Joints)アイコンを右クリックします。
-
Jointパネル内で、Connectivityタブを設定します。
-
 をダブルクリックします。
をダブルクリックします。
- ダイアログでMembraneを選択し、OKをクリックします。
-
 をダブルクリックします。
をダブルクリックします。
- ダイアログでGround Bodyを選択し、OKをクリックします。
-
をダブルクリックします。
- ダイアログでPointMembInterface39を選択し、OKをクリックします。
-
接触の作成
ここで、可変形膜とボールの間の接触力を定義します。
-
以下のいずれかの方法で、Add Contactダイアログを開きます:
- Project Browserから、Modelを右クリックし、を選択します。
- Model-Forceツールバーで、
 (Contacts)アイコンを右クリックします。
(Contacts)アイコンを右クリックします。
- ダイアログで、LabelにContact 0と入力します。
- TypeドロップダウンメニューからPointToDeformableSurfaceContactを選択します。続いて、OKをクリックします。
-
Contactパネル内で、Connectivityタブを設定します。
-
をダブルクリックし、Ballを選択します。続いて、OKをクリックします。
-
をダブルクリックし、BallCMを選択します。続いて、OKをクリックします。
-
 をダブルクリックし、DeformableSurface 1を選択します。続いて、OKをクリックします。
をダブルクリックし、DeformableSurface 1を選択します。続いて、OKをクリックします。
-
-
Propertiesタブをクリックします。
- Radiusに10と入力します。
- Stiffnessに1000と入力します。
- Dampingに0.2と入力します。
- Flip normalボックスからチェックマークを外します。
グラフィックスの作成
このステップでは、ボールにグラフィックを作成します。
-
以下のいずれかの方法で、Add Graphics or GraphicPairダイアログを開きます:
- Project Browserから、Modelを右クリックし、を選択します。
- Model-Referenceツールバーで、
 (Graphics)アイコンを右クリックします。
(Graphics)アイコンを右クリックします。
- ダイアログで、LabelにBallと入力します。
- TypeドロップダウンメニューからSphereを選択します。続いて、OKをクリックします。
-
Connectivityタブで、をダブルクリックします。
- ダイアログでBallを選択し、OKをクリックします。
-
をダブルクリックします。
- ダイアログでBallCMを選択し、OKをクリックします。
- Propertiesタブで、Radiusの下に10と入力します。
- Visualizationタブで、グラフィックの色を選択します。
節点の検索
-
Referenceツールバーで、(Bodies)アイコンをクリックします。
-
ダイアログを閉じます。
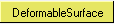
モデルはFigure 3ようになるはずです。
Figure 3.
モデルの実行
-
ツールバーで、
 (Run)をクリックします。
(Run)をクリックします。
-
Runパネルで、Figure 4にリストされている値を指定します。
 Figure 4.
Figure 4. -
 (ブラウザアイコン)をクリックし、ソルバーファイルの名称をresult.xmlと指定します。
(ブラウザアイコン)をクリックし、ソルバーファイルの名称をresult.xmlと指定します。
-
 (Check Model)ボタンをクリックし、モデルのエラーを確認します。
(Check Model)ボタンをクリックし、モデルのエラーを確認します。
結果の表示
このステップでは、アニメーションを確認し、ボールの重心のZ位置およびこの弾性接触について貫通の距離をプロットします。
-
ソルバーがジョブを完了すると、Animateボタンがアクティブになります。Animateをクリックします。
 (Start/Pause Animation)ボタンをクリックし、アニメーションを見ます。
(Start/Pause Animation)ボタンをクリックし、アニメーションを見ます。膜とボールの変位のプロファイルにも注目する必要があります。そのためには、ボールの重心のZ位置をプロットします。
-
パネル内で、プロットについて、Figure 5に示す選択を行います:

Figure 5. -
Applyをクリックします。
ボールのZ変位のプロファイルは、Figure 6に示すようになっているはずです。

Figure 6. -
 をクリックし、セッションに新規ページを追加します。
をクリックし、セッションに新規ページを追加します。
-
パネル内で、プロットについてオプションを、Figure 7に示すとおり選択します。

Figure 7.時間の関数としての貫通のプロファイルは、Figure 8に示すとおりとなっているはずです: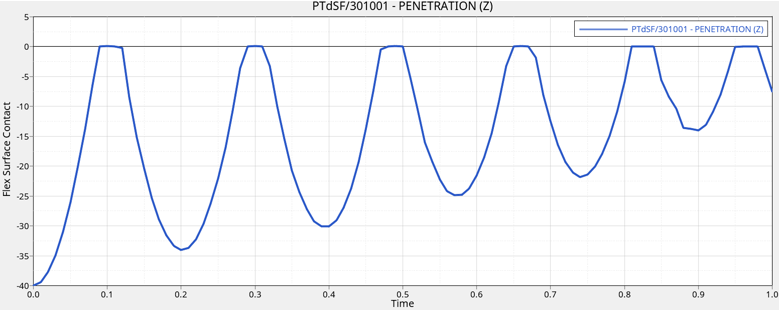
Figure 8.