MV-1000: インタラクティブなモデルの構築とシミュレーション
本チュートリアルでは、MotionViewのグラフィカルユーザーインターフェースを介し、トランクの蓋に取り付けられた4つのリンクから成る機構モデルをインタラクティブに作成し、MotionSolveを使ってモデルの動解析を実行し、MotionSolveの結果をアニメーションおよびプロットウィンドウでポスト処理する方法について学習します。
- マルチボディダイナミクス(MBD)
- MBDは、“内部的に結合されたボディのシステムの動力学のスタディ”と定義されます。機構(MBDシステム)は、互いに結合(拘束)され、外力やモーションがかかると特定の動作を行うリンク(ボディ)のセットから成ります。機構のモーションは、その運動学的な挙動により定義されます。動力学的な挙動は、加えられた力およびモーメントの変化率の平衡に起因します。
- MBDモデリング
- 古典的なMBD定式は、剛体モデリングのアプローチを用いて機構をモデル化します。剛体は、変形が無視できないボディとして定義されます。一般的に、MBD問題を解くには、ソルバーは下記の情報を必要とします。
- 剛体の慣性モーメントと位置
- 結合 – タイプ、関係するボディ、位置および向き
- 外力とモーション – 関係するボディ、位置、向きおよび値
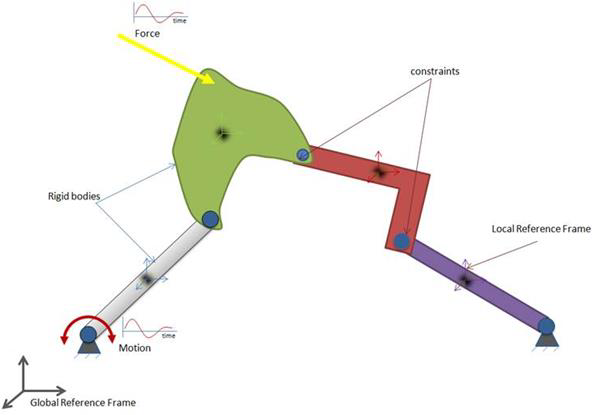
Figure 1.
- トランクの蓋の機構
- 下の図に示すトランクの蓋は、その開閉のモーション用に4つのリンクから成る機構を用いています。
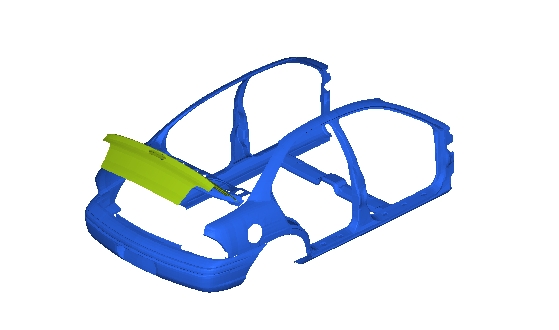
Figure 2. 車のトランクの蓋の機構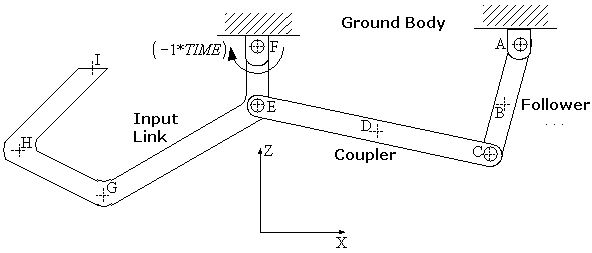
Figure 3.このモデルの構築には、以下のエンティティが必要です:- ポイント
- ボディ
- 拘束条件(ジョイント)
- グラフィックス
- 入力(MotionまたはForce)
- 出力
ポイントの作成
このステップでは、モデルにポイントを作成する方法について学習します。
-
以下の方法のいずれかで、ポイントを追加します:
- Project Browserから、Model を右クリックし、context menuからを選択します。

Figure 4. - Reference Entityツールバーで、
 (Points)アイコンを右クリックします。
(Points)アイコンを右クリックします。
Add Point or PointPairダイアログが表示されます。Note: ボディ、マーカーといったその他のエンティティも、上記の方法のいずれか(Project Browserまたはツールバー)を用いて作成できます。 - Project Browserから、Model を右クリックし、context menuからを選択します。
-
Variableにp_aと入力します。

Figure 5.ラベルでmodeling window内のエンティティが識別できます。一方、変数名はMotionViewがエンティティを識別するために使用されます。Note: 任意のエンティティについてAdd "Entity"ダイアログを使用する際、ラベルと編集名のデフォルトを使用することができます。しかし、最良のモデリングを実現するには、エンティティを容易に識別できるように、意味を成すラベルと変数名を与えることが推奨されます。本演習では既定の命名法に従ってください。 -
OKをクリックします。
Pointsパネルが表示されます。Point AがProject BrowserのPointsリスト内でハイライト表示されています。
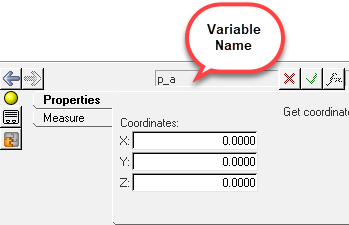
Figure 6. Pointsパネル - Propertiesタブ -
point AのX、Y、Z座標値を入力します。
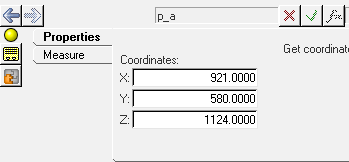
Figure 7. -
複数のポイントを作成します。
-
Pointsパネルで、Data Summary...ボタンをクリックします。
Data Summaryダイアログはポイントの一覧を示し、この一覧にすべての座標値を入力することが可能です。
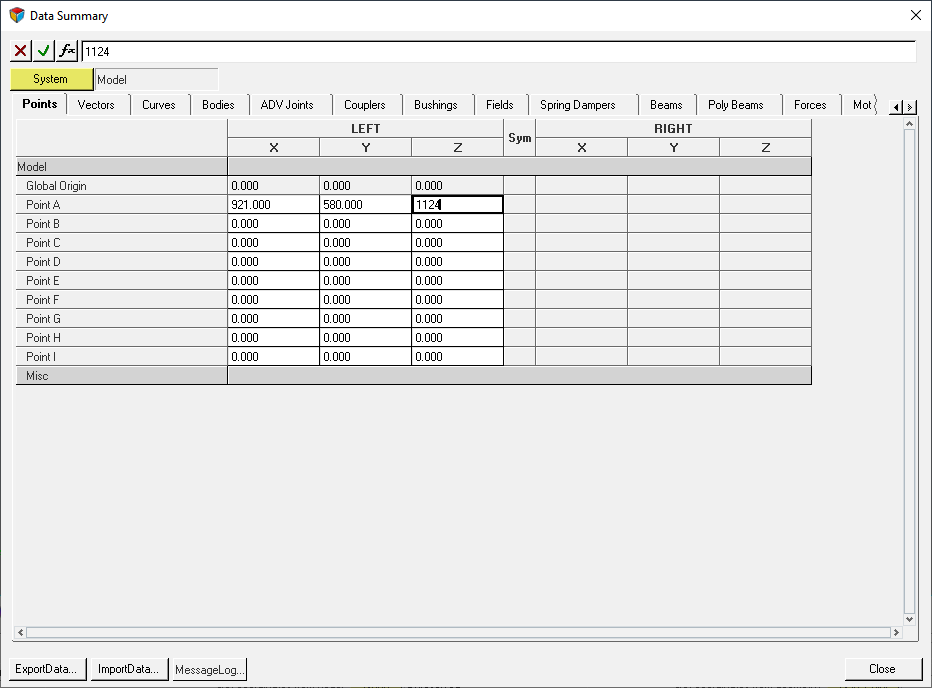
Figure 8.すべてのポイントのYの値は同じなので、Point BからPoint Iまでの値を、Point AのYの値にパラメータ化できます。このプロセスについては、次のステップで説明します。Table 1. ポイント 場所 ラベル 変数 X Y Z Point A p_a 921 580 1124 Point B p_b 918 580 1114 Point C p_c 918 580 1104 Point D p_d 915 580 1106 Point E p_e 878 580 1108 Point F p_f 878 580 1118 Point G p_g 830 580 1080 Point H p_h 790 580 1088 Point I p_i 825 580 1109
-
Pointsパネルで、Data Summary...ボタンをクリックします。
-
Point BからPoint Iまでの値を、Point Aの値にパラメータ化します。
-
 ボタンをクリックし、Expression Builderを起動します。
ボタンをクリックし、Expression Builderを起動します。
-
Point AのYの値を選択します。
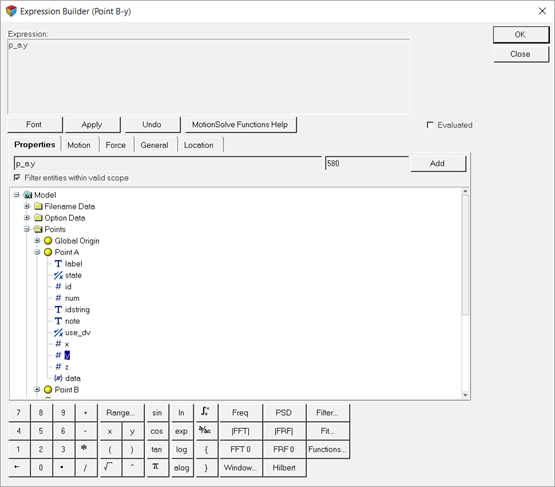
Figure 9. -
上の一覧にリストされているXおよびZ座標値を入力します。
Note: 表内の次の欄に移動するには、キーボードのEnterを押します。
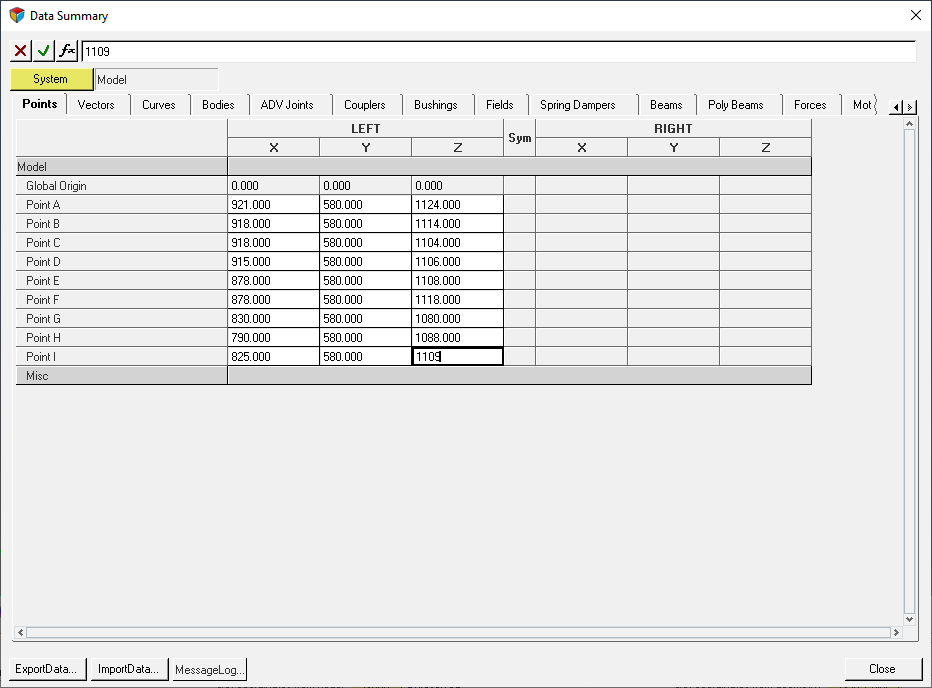
Figure 10.
-
-
Standard Viewsツールバーで
 (XZ Left Plane View)アイコンをクリックし、左側のビューに変更します。
(XZ Left Plane View)アイコンをクリックし、左側のビューに変更します。
ボディの作成
このステップでは、機構内の剛体リンクInput Link、Coupler、およびFollowerを作成します。
-
Reference Entityツールバーで、
 (Bodies)アイコンをクリックします。
(Bodies)アイコンをクリックします。
-
Add Body or BodyPairダイアログで、ラベルをInputLink、変数名をb_inputlinkと指定します。
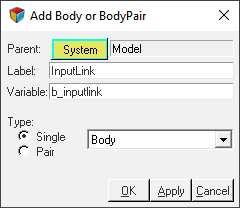
Figure 11. -
質量および慣性モーメントを入力します。
-
次の値を入力します:
- Mass=1
- Ixx、Iyy、Izz= 1000、Ixy、Ixz、Iyz=0
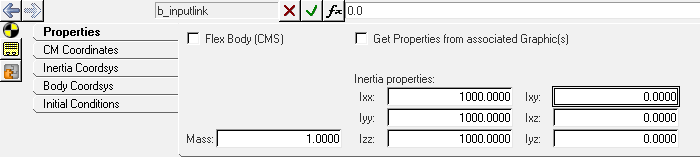
Figure 12.
-
次の値を入力します:
-
Originの下の
 (Pointコレクター)をクリックします。
コレクターが水色の枠で囲まれ、現在選択についてコレクターがアクティブであることを示します。
(Pointコレクター)をクリックします。
コレクターが水色の枠で囲まれ、現在選択についてコレクターがアクティブであることを示します。 -
Point Gを選択します。
-
を再度クリックし、Select a Pointダイアログを起動します。
-
Model TreeからPoint Gを選択します。

Figure 13. -
OKをクリックします。

Figure 14. -
デフォルトの方向指定(Orient two axes)を保持し、
 のデフォルト値を受諾します。
のデフォルト値を受諾します。
Note: このポイントの選択方法は、ボディ、ジョイントといった他のエンティティにも適用できます。Ground BodyまたはGlobal Originを選択するには、画面上で全体座標系を表すトライアド をクリックします。Tip: modeling windowからPoint Gを選択することも可能です。マウスの左ボタンを押したまま、Point Gをハイライト表示させ、、マウスボタンを放してそれを選択します。
をクリックします。Tip: modeling windowからPoint Gを選択することも可能です。マウスの左ボタンを押したまま、Point Gをハイライト表示させ、、マウスボタンを放してそれを選択します。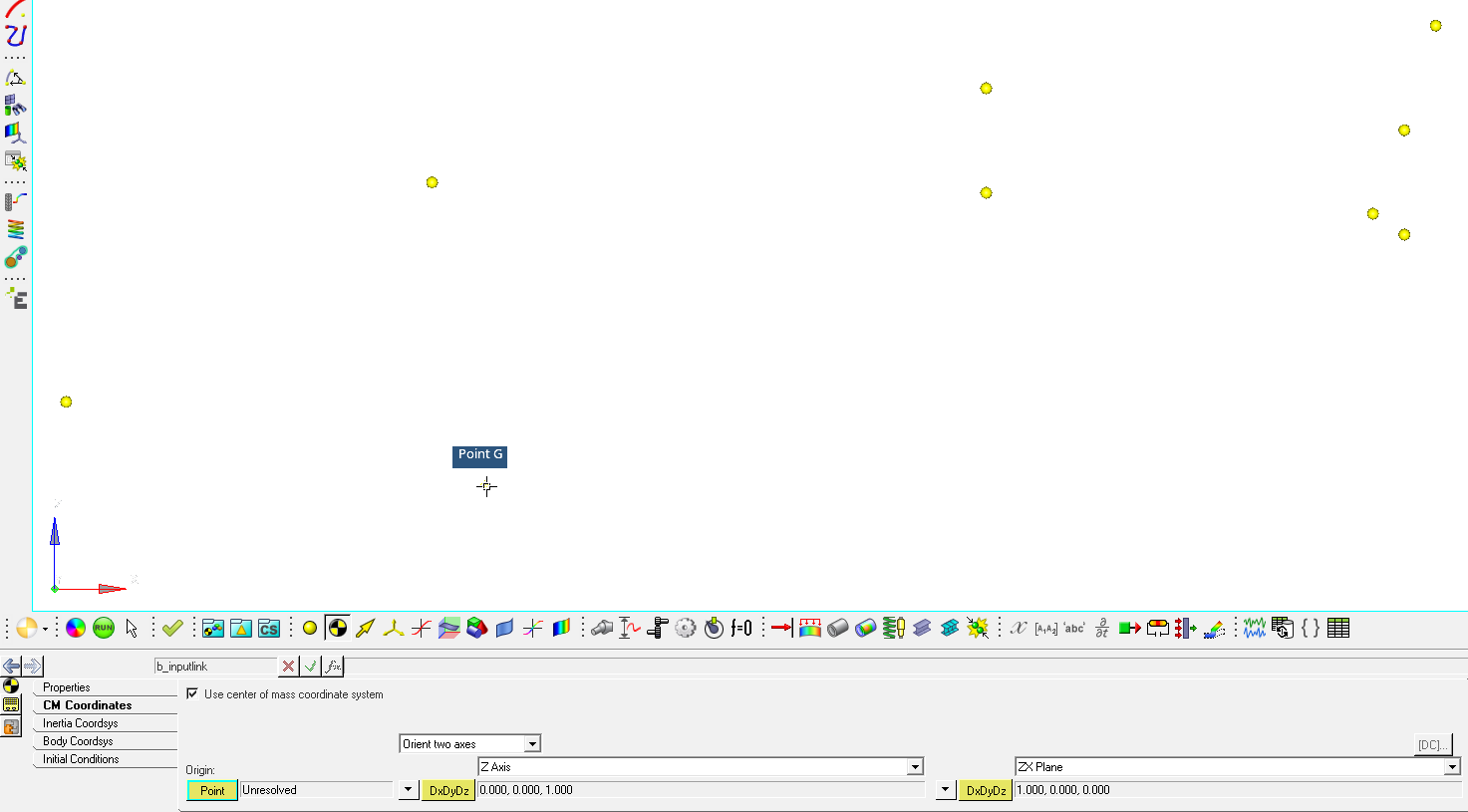
Figure 15. -
回転ジョイントの作成
このステップでは、モデルに必要なジョイントを作成する方法について学習します。
-
以下の方法のいずれかで、ジョイントを追加します:
- Project BrowserでModelを右クリックします。context menuでを選択します。
 (Joints)アイコンをクリックします。
(Joints)アイコンをクリックします。
Add Joint or JointPairダイアログが表示されます。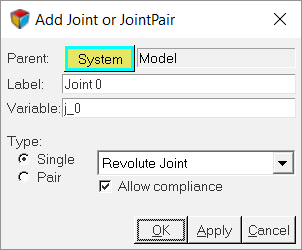
Figure 16. -
Connectivityタブの下で、
 (1つ目のBodyコレクター)をダブルクリックします。
Select a Bodyダイアログが現われます。
(1つ目のBodyコレクター)をダブルクリックします。
Select a Bodyダイアログが現われます。 -
Model Treeの左側の列からBodiesを、右側の列からFollowerを選択します。
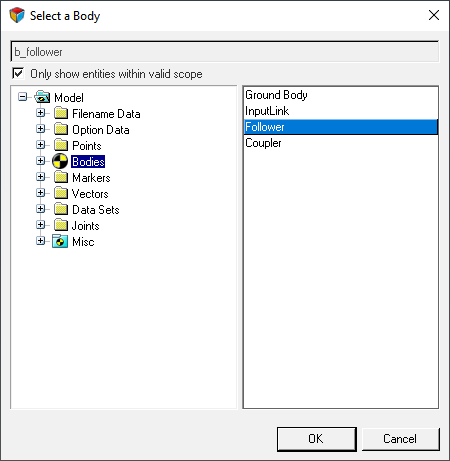
Figure 17. -
OKをクリックします。
JointsパネルでFollower Bodyが選択され、水色の境界は
 に移動しています。
に移動しています。 -
modeling window内をクリックします。マウスの左ボタンを押したまま、カーソルを全体座標系のXYZトライアドに移動します。
-
modeling windowにGround Bodyが表示されたら、マウスの左ボタンを放します。
Figure 18. -
Originの下のコレクターをダブルクリックします。
Select a Pointダイアログが現われます。
-
回転ジョイントの回転軸として、Global Yを選択します。

Figure 19.
機構へのモーションの適用
このステップでは、機構モデルへモーションを追加する方法について学習します。
-
以下のいずれかの方法で、Add Motion or MotionPairダイアログを開きます:
- Project Browserから、Modelを右クリックし、context menuからを選択します。
- Constraintツールバーで、
 (Motion)アイコンを右クリックします。
(Motion)アイコンを右クリックします。
-
Connectivityタブで、
 (Jointコレクター)をダブルクリックします。
Select a Jointダイアログが現われます。
(Jointコレクター)をダブルクリックします。
Select a Jointダイアログが現われます。 -
Model Tree内で、先のステップで作成したPoint Fの位置の回転ジョイント(Input-Ground)を選択します。

Figure 20. -
OKをクリックします。
Motionsパネルが表示されます。

Figure 21. -
Expression欄内をクリックします。
Expression Builderがアクティブになります。

Figure 22. -
ボタンをクリックしてExpression Builderを開き、シングルバッククォーテーションで囲んで式を
`60d*sin(2*0.1*PI*TIME)`のように入力します。
Figure 23.この式は、振幅60度、周波数0.1 HzのSIN関数です。この式によって、トランクの蓋は60度の角度まで開き、トータル5秒で元に戻ります。
出力の作成
このステップでは、デフォルトのエンティティを使って、2つのボディ間に変位出力を追加します。また、Expressionsに基づき全体フレームに対する入力リンク上の特定ポイントGの変位を記録するため、別の出力を追加します。
-
以下のいずれかの方法で、Add Outputダイアログを開きます:
- Project Browserから、Modelを右クリックし、context menuからを選択します。
- General MDLツールバーで、
 (Outputs)アイコンをクリックします。
(Outputs)アイコンをクリックします。
-
新しい出力のラベルをInput Link Displacement、変数名をo_dispと指定します。
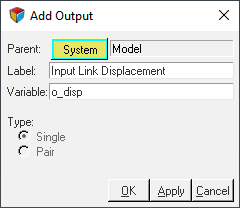
Figure 24. -
2つのボディ上の2つのポイント間の変位出力を作成します。
-
両方の(Both)ポイント間の相対変位出力を作成します。

Figure 25.
-
両方の(Both)ポイント間の相対変位出力を作成します。
-
全体座標系の原点とInput LinkのCMマーカー間のX変位を計算します。
-
F2欄内をクリックします。
これで、ボタンがアクティブとなります。
-
Expression Builderダイアログを開くために、ボタンをクリックします。
-
idstringを選択します。

Figure 26.
-
F2欄内をクリックします。
-
エラーをチェックするために、ToolsメニューからCheck Modelを選択します。
モデルトポロジーにエラーがある場合はMessage Logに表示されます。

Figure 27.Attention: 表記されているID番号は、表示されている画像と異なる場合があります。Note: DX関数は、Input LinkのCM(重心)マーカーとGlobal FrameのX方向のGlobal Frameを表すマーカーとの間の距離を測ります。この関数のシンタックスや使用法などの詳細については、MotionView Reference Guideをご参照ください。式内のシングルバッククォーテーションは、MDL math parserが式を評価するようにするために使用されます。idstringやvalueなどのエンティティのプロパティは、波括弧{}内に置かれている場合に評価され、そうでない場合は普通の文字列とみなされます。MotionViewに取り入れられる様々な評価のフォームや式の詳細については、本チュートリアル末尾のAppendixに含まれるMotionViewでの式の評価の項をご参照ください。
グラフィックプリミティブの追加
このステップでは、グラフィックスを追加して機構を可視化します。
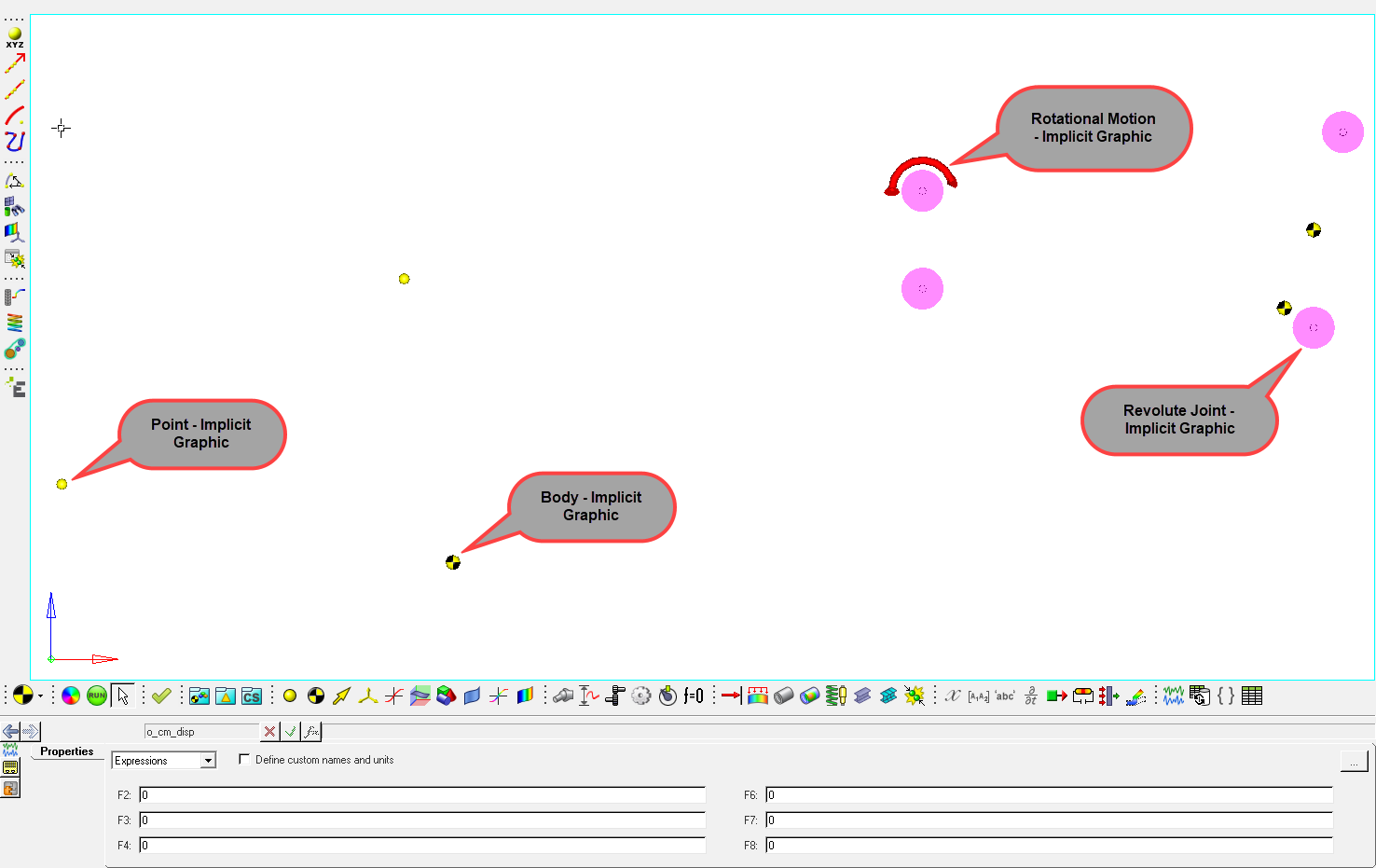
Figure 28. 暗黙的グラフィックスのみでのトランクの蓋
- 暗黙的(デフォルト)グラフィックス
- ポイント、ボディ、ジョイントなどのエンティティを作成する際にMotionViewインターフェースに現れる小さいアイコンは、暗黙的(デフォルト)グラフィックスと呼ばれます。これらは、モデル構築プロセス中のガイド用にのみ提供され、シミュレーションをアニメーション化する際には表示されません。
- 明示的グラフィックス(Explicit Graphics)
- 明示的グラフィックスはテッセレーションのかたちで表され、ソルバーデックに書き出されて、その後、結果内で利用可能となります。明示的グラフィックスには2つのタイプがあります。
- プリミティブグラフィックス
- プリミティブグラフィックスは、モデルをより良く可視化する助けとなり、アニメーション表示内でも見ることができます。MotionViewのプリミティブグラフィックスには、シリンダー、ボックス、球などがあります。
- 外部グラフィックス
- 各種CADフォーマットやHyperMeshファイルをMotionViewにインポートすることが可能です。MotionViewの‘Import CAD or FE using HyperMesh..’ユーティリティは、CADモデルやHyperMeshモデルを、MotionViewにインポート可能なh3dグラフィックフォーマットに変換するために使用できます。また、.g、ADAMS View .shlおよびwavefront.objファイルは直接MotionViewにインポートできます。
MotionViewでは、一般的に使用される一部のモデルエンティティについて、implicitグラフィックスをONとOFFの間で切り替えることが可能です。
-
デフォルトグラフィックスの表示をオンに切り替えるには:
-
Visibleチェックボックスをオンにします。
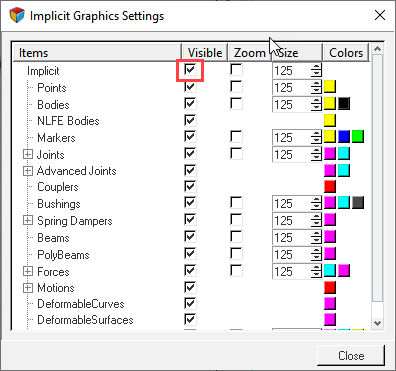 Figure 29. Note: 個々のエンティティの暗黙的グラフィックスは、各エンティティのVisibleチェックボックスを使ってオンオフの切り替えが行えます。
Figure 29. Note: 個々のエンティティの暗黙的グラフィックスは、各エンティティのVisibleチェックボックスを使ってオンオフの切り替えが行えます。
-
Visibleチェックボックスをオンにします。
-
自身のモデルに明示的グラフィックスを追加するには、以下のいずれかの方法でAdd Cylinder or CylinderPairを開きます:
- Project Browserから、Modelを右クリックし、context menuからを選択します。
- Reference Entityツールバーで、
 (Graphics)アイコンを右クリックします。
(Graphics)アイコンを右クリックします。
-
Add Cylinder or CylinderPairダイアログで、ラベルとしてFollower Cylinder、変数名としてgcyl_followerと入力します。
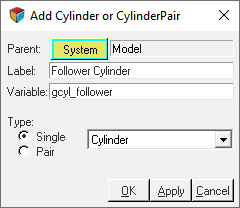
Figure 30.Note: ダイアログの名称は、グラフィックタイプによって変化します。例えば、Boxグラフィックスタイプが選択されると、ダイアログ名はAdd Box or BoxPairに変わります。 -
Connectivityタブで、Parentの下にある
 (Bodyボタン)をダブルクリックします。
(Bodyボタン)をダブルクリックします。
-
シリンダーの原点を選択するために、Originの下のをクリックします。
-
Directionの下のをクリックします。
-
にPoint Cを選択します。
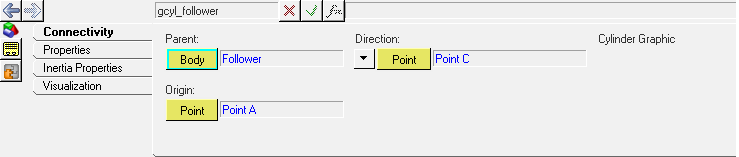
Figure 31. -
Propertiesタブで、Radius 1:欄に2と入力します。
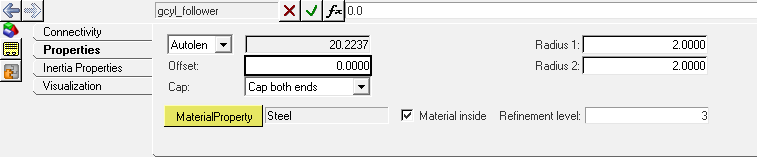
Figure 32.Note: シリンダーグラフィックスは、円錐グラフィックスを作成するためにも使用できます。デフォルトでは、Radius 2がRadius 1と同じ値をとるよう、Radius 2欄はRadius 1に対してパラメータ化されています。円錐グラフィックスを作成するには、異なる半径を指定してください。 -
モデル内の残りのボディについて、手順2から12までに従って、他のリンクに適切な明示的グラフィックスを作成します。Table 4に示すスペックを使用します。
3つのリンクのすべてにシリンダーグラフィックスが追加されると、モデルはFigure 33のようになります:
Table 4. ラベル 変数名 グラフィックタイプ Body Origin Direction Radius Follow Cylinder gcyl_follower Cylinder Follower Point A Point C 2 Coupler Cylinder gcyl_coupler Cylinder Coupler Point C Point E 2 Input Link Cylinder 1 gcyl_inputlink_1 Cylinder Input Link Point F Point E 2 Input Link Cylinder 2 gcyl_inputlink_2 Cylinder Input Link Point E Point G 2 Input Link Cylinder 3 gcyl_inputlink_3 Cylinder Input Link Point G Point H 2 Input Link Cylinder 4 gcyl_inputlink_4 Cylinder Input Link Point H Point J 2 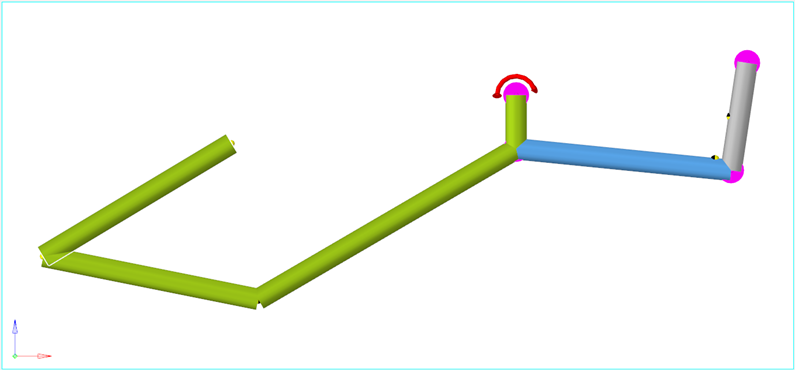
Figure 33.
外部グラフィックスの追加とHyperMeshファイルのH3Dファイルへの変換
ここでは、この変換ユーティリティを使ってトランクの蓋のHyperMeshファイルをH3Dフォーマットに変換します。
-
Input Fileの横の
 ボタンをクリックし、作業ディレクトリ<working directory>にあるtrunklid.hmを入力ファイルとして選択します。
Output Graphic File欄には自動的に、作業ディレクトリ<working directory>からのtrunklid_graphic.h3dファイルが記入されます。
ボタンをクリックし、作業ディレクトリ<working directory>にあるtrunklid.hmを入力ファイルとして選択します。
Output Graphic File欄には自動的に、作業ディレクトリ<working directory>からのtrunklid_graphic.h3dファイルが記入されます。 -
OKをクリックし、インポートプロセスを開始します。

Figure 34.Import CAD or FE using HyperMeshユーティリティは、バックグラウンドでHyperMeshを実行し、HyperMeshファイルをH3Dフォーマットに変換します。インポートが完了すると、メッセージログが、"Translating/Importing the file suceeded!"というメッセージと共に現れます。Note: H3DファイルフォーマットはHyperWorksではニュートラルなフォーマットです。H3Dは、グラフィックスや結果ファイルなど、幅広く使用されます。グラフィック情報は一般的にメッシュ化(モザイク化)されたかたちで保管されます。
H3DオブジェクトをInput LinkとGround Bodyに追加
本ステップでは、トランク蓋のH3DオブジェクトをInput Linkに、トランクのH3DオブジェクトGround Bpdyに結合します。
-
Reference Entityツールバーで、(Graphics)アイコンをクリックします。
-
Connectivityタブで、(Bodyコレクター)をダブルクリックします。
-
Select a Bodyダイアログで、Input Linkをクリックします。
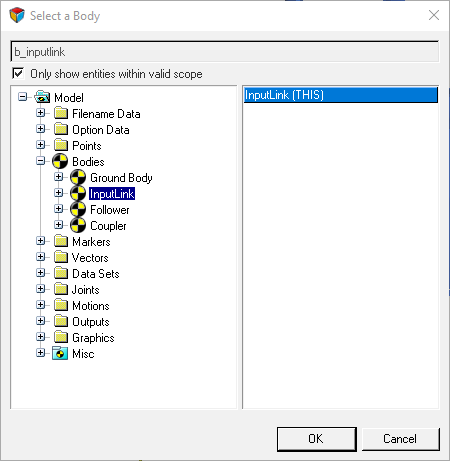
Figure 35. -
OKをクリックします。
これで、Graphicsパネルが表示されます。

Figure 36.Note: トランクの蓋のグラフィックカラーがInput Linkのボディカラーに変わった点にご注目ください。 -
Project Browserから新たに作成されたg_trunk_graphicを選択し、をGround Bodyにセットします。
-
StandardツールバーからSave Modelアイコン
 をクリックします。
モデルが新規である場合、モデルの名称を入力するようプロンプトが出されます。そうでない場合、モデルは既存の名称で作業ディレクトリに保存されます。Note: 既存のモデルはFileメニューのオプションを使って別のファイルに保存することも可能です。
をクリックします。
モデルが新規である場合、モデルの名称を入力するようプロンプトが出されます。そうでない場合、モデルは既存の名称で作業ディレクトリに保存されます。Note: 既存のモデルはFileメニューのオプションを使って別のファイルに保存することも可能です。 -
Save As Modelダイアログで作業ディレクトリをブラウズし、ファイル名:にtrunklid_mechanism.mdlと指定します。
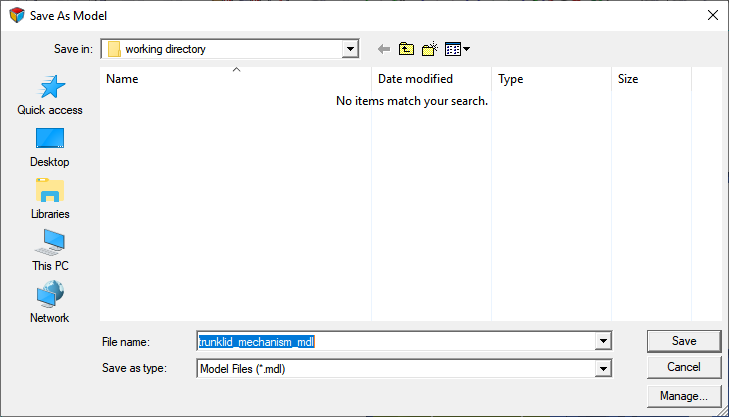
Figure 37. -
保存をクリックします。
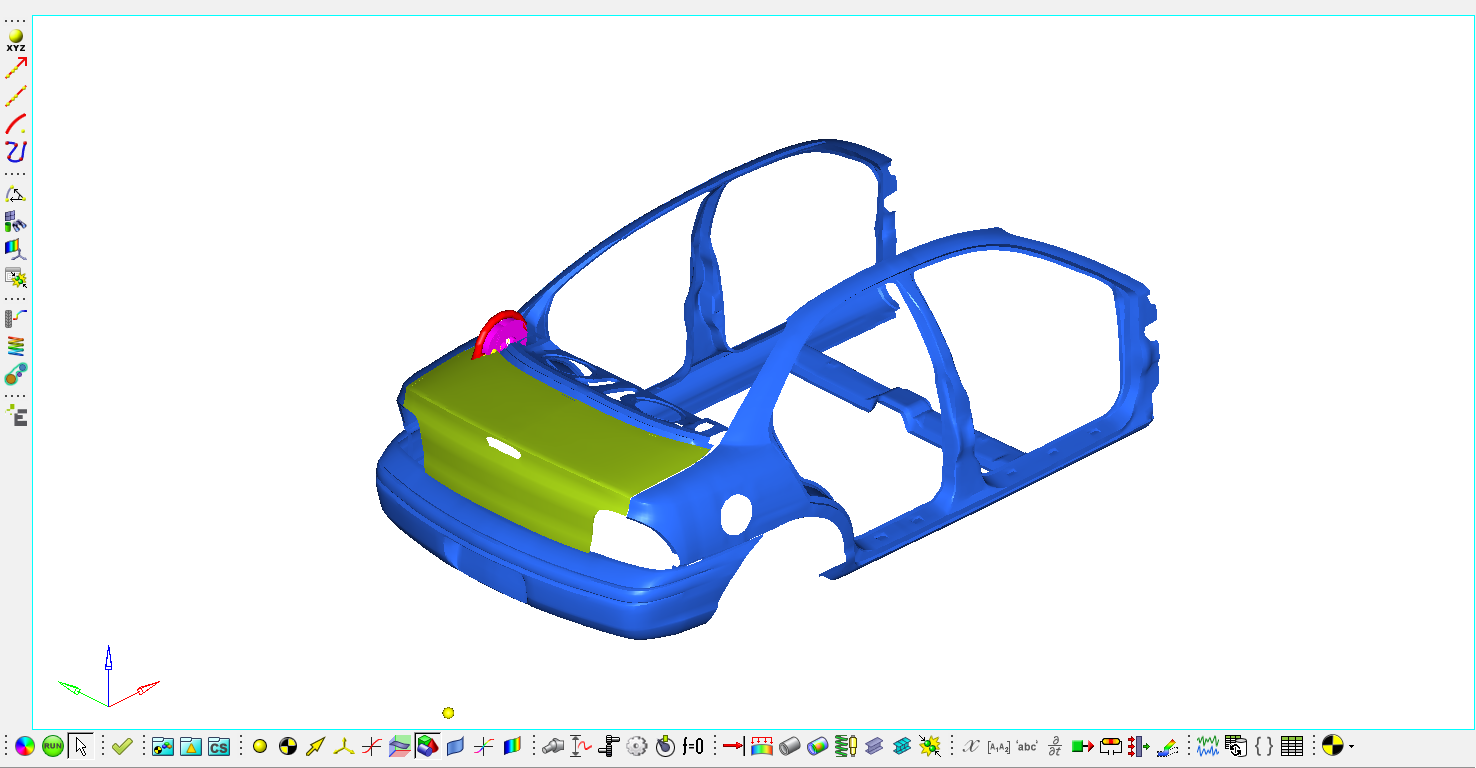
Figure 38. トランクの蓋の機構
MotionSolveによるモデルの解析
このステップでは、MotionSolveを使って、シミュレーション時間5秒、ステップサイズ0.01秒で、トランク機構の運動学解析を実行します。
-
General Actionsツールバーで、
 (Run)アイコンをクリックします。
(Run)アイコンをクリックします。
-
Model Checkツールバーで、
 (Check model)ボタンをクリックし、モデルのエラーをチェックします。
(Check model)ボタンをクリックし、モデルのエラーをチェックします。
-
シミュレーションのEnd timeを5、Print intervalを0.01と指定します。

Figure 39.Note: 時間単位は、選択した時間単位に基づいています(デフォルトは秒)。Solver UnitsとGravity Data Setsには、Project Browserからアクセスできます。
Figure 40.
同じページ上でのアニメーション結果とプロット結果の確認
このステップでは、アニメーションとプロットを同じページ上で確認します。

Figure 41.
-
ツールバー上の
 アイコンをクリックし、アニメーションを開始します。
Note: ボタン
アイコンをクリックし、アニメーションを開始します。
Note: ボタン を再度クリックすると、アニメーションを停止することができます。
を再度クリックすると、アニメーションを停止することができます。 -
Applyをクリックします。
全体座標系の原点に対するPoint Iの変位の絶対値がプロットされます。
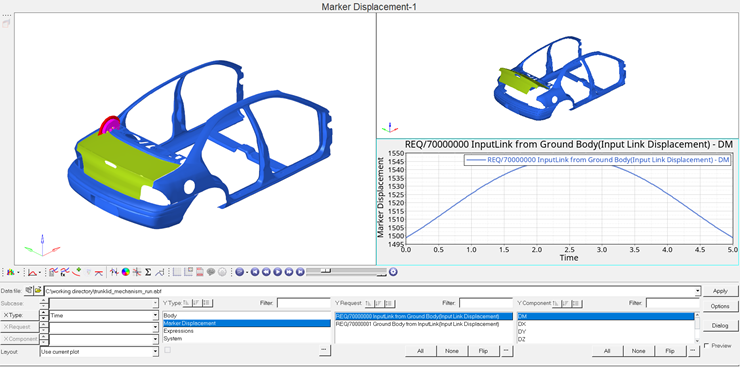
Figure 42. モデル、プロット、およびアニメーションが含まれたセッション
作業をセッションファイルとして保存
このステップでは、作業をセッションファイルとして保存する方法について学習します。
Appendix
MotionViewでの式の評価
| Math Parser | |
|---|---|
| MotionViewの式を適切なreal/integer/stringのフィールドとして評価するMotionViewパーサー。 | |
| Real | この種のフィールドは、実数、または、評価した結果が実数となるパラメトリックな式を含むことができます。この種のフィールドは、Points、Bodies、Force – Linearに見られます。パラメトリックな式ではなく、評価された式の値のみがソルバーデックに渡される点にご注目ください。 例: p_a.x, b_0.mass |
| String | この種のフィールドは、文字列、または、評価した結果が文字列となるパラメトリックな式を含むことができます。この種のフィールドは、Datamember、SolverStringなどの文字列をもったデータセットなどのエンティティに見られます。 Linearフィールドと同様、パラメトリックな式ではなく、評価された式の値のみがソルバーデックに渡される点にご注目ください。 例: b_inputlink.label |
| Integer | この種のフィールドは、整数、または、評価した結果が整数となるパラメトリックな式を含むことができます。この種のフィールドは、Datamemberとして整数をもったデータセットなどに見られます。この場合でも、パラメトリックな式ではなく、評価された式の値のみがソルバーデックに渡される点にご注目ください。 |
| Templex Parser | |
|---|---|
| MotionViewの式を評価する以外にmath parserよりも複雑なプログラミングを実行することのできる、HyperWorksに用意された数学プログラム。MotionViewでは以下のタイプのフィールドが、パラメータ化された式を評価するtemplex parserにより評価されます。 | |
| Expressions | この種のフィールドは、パラメトリックな式とテキストとのコンビネーションを含み得る点で、上記の3つとは異なります。一般的に、フィールドは、ソルバー関数(またはソルバーによって認識される関数)を定義するために使用されます。この種の式はバッククォーテーション(` `)に囲まれ、任意のパラメトリックリファレンスは波括弧{}に囲まれて与えられます。バッククォーテーションの存在は、Templexを介して式を渡すことをmath parserに提案します。Templexは波括弧内の式を評価し、その他のテキスト部分は保持します。例えば、式 ` DX({b_inputlink.cm.idstring},{Global_Frame.idstring})`では、TemplexはInput linkボディ (b_ inputlink)のcmのID(文字列)とマーカーGlobal FrameのIDを評価し、“DX”はそのまま保持します。これらのフィールドは、Bushings、Motions、Forcesなどのパネルに、これらのエンティティ内のカーブ入力のExpression、Independent variable、タイプExpressionのOutputsに切り替えられるプロパティと共に用意されています。 |