Altair MotionView 2021リリースノート
主な特長
- MotionView Python API
- MotionView-EDEMインターフェースの更新
- クローラ・履帯ビルダー
- 新しい傾斜三輪車サンプルモデル
- 新しい1Dアンチロックブレーキシステム
- フルビークルイベントの更新
- DELFT-TYRE(MF-Tyre/MF-SWIFT)バージョンの更新
- その他の機能強化
- 解決された問題点
MotionView Python API
MotionViewに、モデルを作成するためのPythonインターフェースが追加されました。APIを使用して、PythonによりMotionViewモデルを作成、照会、および変更できます。この機能は、Python言語の能力と柔軟性を活用しながら、モデル化とカスタマイズの道を開きます。
エンティティごとのAPIドキュメントとサンプルコードがMotionView Python Reference Guideで参照できます。
MotionView-EDEMインターフェースの更新
弾性体とAltair EDEMの連成がサポートされるようになりました。弾性体をEDEM-GUIに移動できるだけでなく、EDEMシステムに弾性体を追加して相互作用を設定することもできます。
MotionViewでは、形状をEDEM-GUIに移動するためにバックグラウンドでobjファイルが使用されるようになりました。この変更により、移動プロセスが大幅に高速化されます。加えて、EDEMシステムパネルがボディとグラフィックスのどちらかをピックするための新しいオプションで強化されました。この変更により、1つのボディに属しているすべてのグラフィックスを一度に選択できるようになります。詳細については、Bulk Material Interactionのトピックをご参照ください。
クローラ・履帯ビルダー
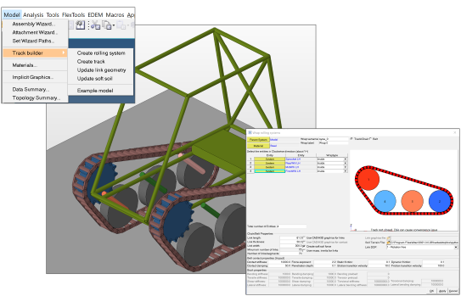
図 1.
詳細については、MotionSolveユーザーガイドのTrack Modelのトピックをご参照ください。
新しい傾斜三輪車サンプルモデル
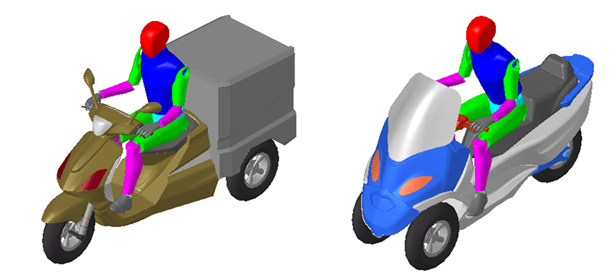
図 2. 1+2および2+1の三輪傾斜車両
新しい1Dアンチロックブレーキシステム
MotionAutoに、新しい1Dアンチロックブレーキシステムが追加されました。この1Dモデルは、MotionViewとMotionSolveで使用するためにAltair Activateからエクスポートされ、MDLシステムによってラップされたFMUで作成されています。1Dアンチロックブレーキシステムは、Car/Small Truckライブラリのアセンブリウィザードオプションとして提供されており、Sedan_1サンプルモデルにも含まれています。Altair Activateモデル(.scmファイル)が含まれているため、必要に応じてモデルを表示して編集し、新しいFMUを生成できます。アンチロックブレーキシステムは、制動下で車輪ロックアップが差し迫っていることを感知し、個別のブレーキキャリパーに対する油圧ブレーキ圧を調節して、車輪ロックを回避します。1Dアンチロックブレーキシステムは、車両モデルからフィードバックとして車輪速度、車両前後加速度、およびフロントとリアのマスターシリンダー油圧を取得して、ブレーキキャリパーの油圧を出力します。アンチロックブレーキシステムは、制御ブロックと油圧ブロックで構成されます。制御ブロックは、車輪速度と車両縦加速度を使用してタイヤ縦滑りを見積もり、油圧制御バルブを調節して、滑りを抑えるために必要な特定の車輪に対する油圧を低減します。
フルビークルイベントの更新
- 路面の選択
- すべてのイベントエディターに、路面を選択するためのオプションメニューがあるRoad Parametersセクションが追加されました。平坦路でイベントを実行するのか、イベントエディターで選択した路面ファイルでイベントを実行するのか、AutoTiresから指定した路面ファイルでイベントを実行するのかを選択できます。

図 3. - 路面グラフィックス
- 加えて、平坦路での走行を選択した場合は、イベントエディターに路面と経路のグラフィックスを作成するためのオプションが表示されます。路面設定のダイアログでは、グラフィックスのサイズと色を制御できます。
図 4. 路面および経路グラフィックスを使用した一車線変更 - DriverのPIDゲイン
- すべてのイベントエディターでDriverのゲインを設定する機能が提供されるようになりました。使用可能なゲインは車両タイプによって異なります。傾斜車両(バイクやスクーターなど)の場合は、傾き角と経路のPIDゲインを設定できます。すべての車両で、前後方向のPIDコントローラーのゲインを追加および設定することによって、速度と加速度の制御を改善することができます。
MDLライブラリの機能強化
- 2輪車ライブラリ
-
- スクーター用に製造された従来のテレスコピックフロントフォークシステムが、オプションとして、二輪車アセンブリウィザードで使用可能になりました。
- スクーターのフロントとリアのサスペンションシステムの剛性と減衰の値が更新され、より現実的な上下振動数が提供され、過減衰が排除されるように更新されました。
- トラックライブラリ
- トラックライブラリに、ピットマンアームステアリングシステムに対する電動アシストシステム(EPAS)用のオプションが追加されました。アシストトルクは、ドライバからのトルクと平行して、ステアリングギアへの入力シャフトに作用します。
DELFT-TYRE(MF-Tyre/MF-SWIFT)の2020.1.1へのバージョンアップ
Altair HyperWorksに付属しているSiemens製のDELFT-TYREで、Simcenter Tireがバージョン6.2.2からバージョン2020.1.1に更新されました。Simcenter Tireは、TASS/TNOのDELFT-TYREのSiemenによる商標変更です。DELFT-TYREバージョン2020.1.1は、スレッドセーフで、リアルタイムオペレーティングシステムに使用できます。DELFT-TYREバージョン2020.1.1を採用しているMotionSolveモデルは、DELFT-TYRE 6.2.2を採用しているモデルより高速で動作しながら同様の結果を生成します。DELFT-TYREとMotionSolveを使用しているユーザーのほとんどが高速化したことに気付くはずです。ただし、DELFT-TYREの長期ユーザーが気付かなければならない違いはいくつかあります。それらについては、後述の“相違点”セクションで説明します。
- 相違点
- DELFT-TYREバージョン2020.1.1には、MF-Tyre/MF-Swift 6.2に関して次のような違いがあります。
- サポートされないフィットタイプ
- DELFT_TYRE 2020.1.1では、以下のバージョンのMagic Formula式(フィットタイプ)に対するサポートが中止されてます。
FITTYP = 21 MF-Tyre 5.2 Magic Formula式 FITTYP = 50 MF-Tyre 6.0 Magic Formula式 さらに、タイヤプロパティのパーサーが以前のバージョンのDELFT-TYREより厳密になったため、通常、ファイル内のFITTYPを旧バージョンから新バージョンに変更することはできません。これらのサポートされないフィットタイプを使用しているタイヤプロパティファイルが存在する場合は、HyperWorksインストールに含まれている新しいサンプルタイヤプロパティファイル(..Altair\2021.0\hwdesktop\hw\mdl\autoentities\properties\Tires\MF_SWIFTを参照)の使用を検討するか、Siemensに古いタイヤプロパティファイルの再適合を依頼してください。
- プロパティファイルのヘッダーブロック
- DELFT-TYRE 2020.1.1では、タイヤプロパティファイルの最初のブロックとしてブロック名[MDI_HEADER]を使用する必要があります。古いバージョンのHyperWorksに含まれている一部のサンプルタイヤプロパティファイルでは、最初のブロックとして[ALTAIR_HEADER]が使用されており、DELFT-TYRE 2020.1.1ではこのようなファイルの読み取りでエラーが報告されます。ALTAIR_HEADERをMDI_HEADERに置き換えることによってこのエラーは修正されます。
- プロパティファイルの単位
- タイヤプロパティファイルでは、入力としてSI単位のみが許容されます。非SI単位からSI単位への自動変換はサポートされていません。
- 2Dエンベロープ接触
- 2Dエンベロープ接触法は廃止されました(USEMOD = 4xx)。
- バイク用接触モード
- DELFT-TYRE 2020.1.1では、パラメータMC_CONTOUR_AとMC_CONTOUR_Bの値によって、タイヤがバイク用タイヤかどうかが決定され、バイク挙動が有効になります。バイク用接触モードが廃止された(USEMOD = 2xx)ため、自動車用タイヤはバイク用タイヤとして処理できなくなります。その逆も同じです。
- TNO Roads
- DELFT_TYRE 2020.1.1では、rdfフォーマットの2D ‘TNO Roads’(PlankRoad、PolylineRoad、SineRoadなど)と、タイヤの移動距離を2D路面の縦座標として使用するためのUSEMOD = 3xxのサポートが中止されます。可能な限り、2D ‘TNO Roads’はAltairの2D路面に置き換えられます。
- 既知の問題点
- TNO平坦路で路面摩擦係数MUを設定しても、DELFT-TYREバージョン2020.1.1では効果がありません。DELFT-TYREバージョンでは、ユーザー入力が無視され、MU = 1.0とみなされます。
CDTireのv4.2.11へのバージョンアップ
HyperWorks 2021では、CDTireがバージョン4.2.2からバージョン4.2.11に更新されました。追加情報については、CDTireのドキュメントをご参照ください。
CDTire for MotionSolveでAltair Licensingを採用
HyperWorks 2021リリースから、CDTireでAltair Licensingが使用されるようになりました。過去にCDTire for MotionSolveまたはサイズ変更付きのCDTire for MotionSolveを購入し、メンテナンス費をお支払いの場合は、HyperWorks 2021ライセンスでCDTireとMotionSolveを使用できます。これは、今後、CDTireライセンスサーバーを実行して別のCDTireライセンスをインストールする必要がなくなることを意味します。CDTire用のユニット消費がないことに注意してください。CDTire for MotionSolveを購入し、Altair LicenseでCDTireの使用が有効にならない場合は、Altairのお客様担当者にお問い合わせください。
既知の問題点
- Linux Road Toolsの問題点:イベント経路に使用される3D Spline Roadには、閉ループイベントに影響する問題があります。
- 電動パワートレインにアクセスするには、ENVVARを設定する必要があります。
- 路面MUがDELFT-TYRE 2020.1で有効になりません。
その他の機能強化
- Multi-Disciplinary Toolsの更新
-
- 従来の“points2mesh”マクロは、新しい“points2nodes”マクロと“points2fpoints”マクロに置き換えられました
- 従来の“roller2Dcam_*”システムは、新しい“roller2cam”マクロに置き換えられました
- 新しいドアパネル用のシール機能
- HyperMeshでの形状機能の更新
- “apply2displayed”マクロと“apply2marked”マクロの管理の簡素化
- “apply2marked”モードでの“line2motion”マクロ管理の改善
- FMUの更新
- FMUパネルとEditダイアログが更新されました。Reload FMUがFMUエンティティパネルで使用できるようになりました。入力とパラメータを別々にリセットするReset to defaultsボタンが使用できます。
FMUのMDLステートメントが改訂されました。InputおよびParameter配列引数が*FMUから削除されたのに対して、新しいデータステートメント*SetFMUInputsと*SetFMUParametersが提供されます。MotionViewは下位互換性を維持しています。古いステートメントの使用に対するサポートは継続されます。MotionViewは、自動的に、新しい構文とステートメントで保存します。
- ジョイントの仮想化
MotionViewは、MotionSolveのジョイントの仮想化機能をサポートしています。ここでは、ジョイントが絶対制約ではなくソフト制約として表されます。これは、特に、制約が冗長なモデルで役に立つ試験的な機能です。ユーザーの視点からは、標準ジョイントと仮想ジョイントは、仮想ジョイントが制約の冗長性を導入しないという例外を除いて、運動学および動力学的には同じです。また、仮想ジョイントは、標準ジョイントと同様にジョイント摩擦を扱うため、摩擦をモデル化する必要のあるブッシュの代わりに適しています。
環境変数HW_MV_EXPERIMENTAL=VIRTUAL_CONSTRAINTSを使用することによって、MotionViewパネルでのジョイント / モーションのVirtualオプションの使用が可能になります。- 形状インポート
- 形状のインポートプロセスが簡略化されました。形状はMotionViewに直接インポートされます。追加の入力は必要ありません。材料割り当ては、グラフィックスの選択時にグラフィックス領域での右クリックによるコンテキストメニューで行うことができます。
- システム内の暗黙的グラフィックスの非表示
- システムエンティティレベルで属性draw_graphicを使用が使用可能となり、システム内のエンティティの暗黙的グラフィックスの表示 / 非表示を切り替えることができます。使用方法:*Set(sys.draw_graphic, false)。ここで、sysはシステムの変数名です。falseに設定すると、子システムを含むシステム内のすべての暗黙的グラフィックスが非表示になります。
- 欠落しているグラフィックスファイル
- ファイルグラフィックスの参照ファイルが欠落していても、接触で使用されていない場合は、ソルバーデックのエクスポートが阻止されなくなります。現在は、エラーの代わりに警告が発行されます。
- ユーザー定義ソルバー文字列
- ユーザー定義ソルバー文字列がサポートされるようになりました。
解決された問題点
- コンプライアントジョイント内のボディのデータメンバーが、一部のケースでボディのマージ後に古い参照を参照していた。
- 呼び出し時にParametric pointsテーブルの最初のエントリが空になる。
- ポイントがGlobal Frameで定義されている場合は、Parametric Pointsがloc_rel_to関数を使用しない。
- データセット経由でファイルを変更すると、参照マーカーを使用して定義されたグラフィックスがGlobal Frameを基準に表示される。
- 読み取り専用フォルダーに配置されたFMUにアクセスできない。
- 同じ親内でAutoエンティティをコピーすると、定義名が原因でエラーが発生する。
- 選択されたエンティティが接触でない場合に接触プロパティマクロをクリックするとアプリエラーが発生する。
- 弾性体でのCratio Vector Dampingで問題が表示される。
- 時間単位としてミリ秒を使った弾性体の解析に失敗する。
- 車両モデルからグラフィックシステムをコピーするとMotionViewがクラッシュする。
- RunパネルのSimulation SettingsでCPU core欄を変更すると、アプリエラーが発生する。
- Formsダイアログ経由でエンティティデータを編集すると、アプリエラーが発生する。
- MTXファイル内のMODLOADマトリックスに書式設定の問題がある。
- その他のいくつかのMsolve Pythonへのエンティティエクスポート問題。
- HypermeshツールによるImport CAD/FEを使用したHypermesh FEモデルのインポートで質量と慣性の移動に失敗する。
- *Ifステートメントを含むシステムからのエンティティのカットアンドペーストがエラーになる。
- グラフィックシステムにグラフィックスが置かれたボディのカット / コピー / ペーストによりアプリケーションのクラッシュの発生する。
- ADFファイル駆動の車両モデルがFMUとして使用されると解析に失敗する。
- エンティティに対するフィルターをオンにして曲線を選択し、別のタブに移動すると、データサマリーでアプリエラーになる。
- 不正な値または式を入力するとCG慣性サマリーでアプリエラーになる。
- Beam pairパネルのSymmetric propertiesチェックボックスが機能しない。
- NLFEベルトプーリとNLFEスプリング内のPLINE要素の減衰が0.001に変更された。
- 新しいセッションの作成後のAssembly-Save As実行中にアプリケーションエラーが発生する。
- MotionSolve Pythonへのエクスポートに伴う問題。
- 位置ベースの関数が、大文字またはセンテンスケースで使用された場合、誤ってMSolve Pythonにエクスポートされる。
- 変形可能なサーフェスが存在する場合にMotionSolve pyフォーマットへのエクスポートが失敗する。
- 非コンプライアントジョイントに対する力出力で、ジョイントのコンプライアントパートに対する要求が作成される。