Altair MotionSolve 2021.2 Release Notes
General
New Features
- Activate, MotionSolve, and EDEM Co-Simulation
- MotionSolve can interface with Altair EDEM, a state-of-the-art bulk material simulation tool. EDEM is based on the Discrete Element Method (DEM) that simulates and analyzes the behavior of bulk materials, such as sand, granules, capsules, grass, rock masses, and so on. In this co-simulation, the mechanical part is modeled in MotionSolve and the bulk material is defined in EDEM. MotionSolve is the leading solver.
-
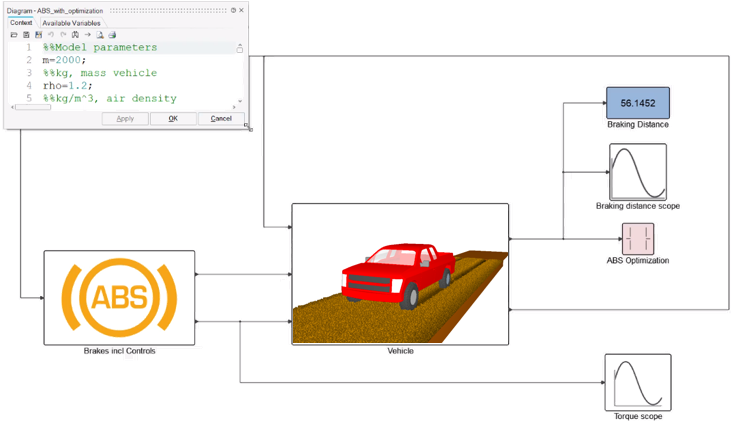
Figure 1.
Enhancements
- Tutorial Model Files Removed from Installation Package
- To reduce the footprint size, the following tutorial model and demo
model files are no longer included in the local installation. You can
now find zipped tutorial model files and demo model files on Altair One
via the Altair Community, Altair Marketplace, and Altair Connect sites.
Altair recommends that you create an Altair One account and use it as
your primary portal to access product documentation, a Knowledge Base,
and customer support.
- Tutorial Model Files
-
- MotionSolve
Beta Features
A beta feature is one with early access due to high interest, but still can contain bugs, unfinished work, or rough edges. Please be mindful of the risk if using a beta feature.
- Active Contact Iteration (Beta)
- MotionSolve allows you to define a 2D or 3D contact force between two rigid bodies. Each body is characterized by a set of one or more geometries, which can be a 3D mesh, an analytically defined solid, or a 2D curve. Whenever any geometry on the first body penetrates any geometry on the second body, contact normal and frictional forces are generated. In this release, the rigid-to-rigid contact algorithm has been expanded with an “Active Contact Iteration” option that allows penetration to be updated during the iteration using the analytical Jacobian. This feature reduces noise in the contact forces.
- Bearing Elements (Beta)
- Bearings are involved in almost all mechanisms, such as gearboxes, engines, robotic arms, and so on. In traditional Multibody Dynamics, bearings are often simplified by kinematic constraints, such as revolute of cylindrical joints, or by bushings. To overcome this impediment, MotionSolve was expanded with bearing components designed particularly for system analysis. In other words, they were designed to accurately replicate the non-linear compliance of bearings but are simplified enough to accommodate the need for high computational performance. The bearing components require only simple user input that can be found in many bearing catalogues. Their results can be used to study bearing loads and their life expectancy. The bearing components are developed on top of the MSolve API. They do not exist in MotionView yet. Their support in MotionView will be released in the future.
-
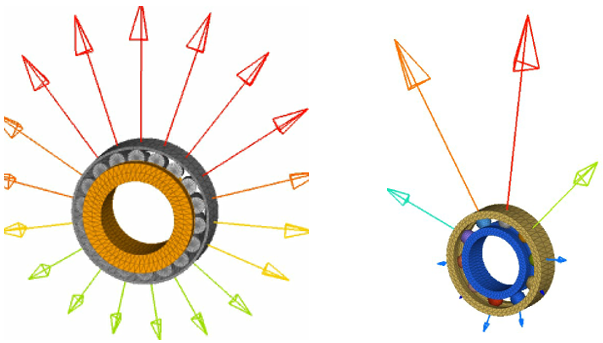
Figure 2.
Resolved Issues
- Updated B123 that resolves some issues at singularities (~90 degree).
- Improved memory management for models, including NLFE components.
- If a body had a large initial rotation, then the system was not assembling to the correct configuration.
- Kinetic energy is reported in model units to be consistent with other results.
- OML support not available on Linux with Compose 2021.1. Use Compose 2021 instead.
- Graphics entities have an additional optional attribute called hidden for most graphics that prevents graphics from being written to the H3D.